The “angle trisection-halting problem” impossibility analogy is fundamentally based on the obscure perception that; the classical geometric notion of constructability in Euclidean plane geometry corresponds to the modern theory of computability. Specifically, the difficulty of empirical trisectability of any angle has been viewed as analogous to the impossibility of solving the halting problem. The primary goal of this paper is to establish the inherent incompatibility between the geometric trisectioning of angles and the halting problem. The exposed proof concern the genetic solutions methodic characterization of the inconsistencies between the angle trisection problem and the halting problem. We show that regarding their attempts at solutions, the genetic trisectability of an arbitrary angle leads to solving the halting problem in geometric cryptographic schemes. It is upon the characteristic inconsistencies that we establish a provable refute of the validity of considering the practical applications of geometric cryptography as a solid source for cryptographic principles.
Encryption is the technique of encoding messages (information) to prevent eavesdroppers or hackers
from decrypting them but allowing authorized parties to do so. The message or information (commonly
referred to as plaintext) is encrypted using an encryption technique, resulting in the unreadable
ciphertext. Several cryptography techniques exist; including the geometric cryptographic schemes [1,2].
Based on the symmetric cryptography algorithm used to encrypt input data, this paper establishes
the incompatibility between the geometric trisectioning of angles and the halting problem in recursion
theory. We will in specific, focus on a form of a cryptographic technique called symmetric encryption.
In this method, a similar key is utilized for both encryption and decryption procedures, and it is shared
between the two communicating parties. It is a technique in which the information source encodes the
plaintext and sends the ciphertext to the recipient using the key (or some set of restrictions). To decode
the message and recover the plaintext, the receiver uses the same key (a set of predetermined rules).
As a result, it is a type of cryptography in which both the information source and the recipient must
know the key [3]. We will then employ the developed workflow for generalized geometric
cryptographic schemes.
The “angles trisection-halting problem impossibility” analogy has been
employed as a handy genetic example of symmetric encryption systems. The “angles trisection
impossibility-halting problem impossibility” analogy is a geometric encryption method in which
communications and ciphertexts are geometrically represented by angles or intervals of other
geometric quantities (that may represent angles such as curves or straight-line segments).
Computations are genetically based on straightedge and compass construction rules in this method [4].
The difficulty and impossibility assertions associated with solving some geometric problems, such as
the trisection of an arbitrary angle using a straightedge and compass operations, serve as the foundation
for the many geometric cryptography schemes [1,5]. Across the cryptographic historical
frameworks, the first geometric cryptographic scheme was presented by [3], and the field has seen
consistent growth in scientific research for decades [6]. Even though cryptography methods based on
the plane Euclidean geometry system have practically limited physical applications (the geometric
cryptographic schemes do not concern the classical straightedge and compass constructions), they are
mostly utilized as pedagogic machinery for explaining more advanced cryptographic protocols [3,6].
The focus of this paper is to show that although the “angles trisectability-halting problem”
impossibility analogy has frequently been utilized in the design of cryptographic techniques, its
fundamental building blocks are geometrically misconstructed and it provides a weak framework for
the application in cryptographic pedagogies and practices. We investigate the genetic characteristics
of the two problems, the trisection of an arbitrary angle and the halting problem (based on the
symmetric encryption method), and show the characteristic contrasts between the two problems in
demonstrating their inherent incompatibility. Furthermore, we believe that for one to break the “angle
trisectioning-halting problem” impossibility scheme; any such assertions should objectively be based
on either, having sought the trisection of an arbitrary angle, or, by solving the halting problem or
solving both of the problems. In this case, we use the “AG-Algorithm” [7] approach, which, when
combined with the genetic definition of the two problems, invalidates the geometric cryptography
analogy.
The rest of the paper’s workflow is organized as follows: §2 deals with halting problem
characterization, §3 concerns the angle trisection problem characterization, §4 deals with
the characterization of the “angle trisection impossibility-halting problem” analogy and its limitations,
§5 provides detailed discussions of the developed issues though the paper, and, §6
concludes the workflow.
2. Characterization of the Halting Problem
The halting problem is a decision problem in which you must determine if a computer program will
eventually halt when run with the provided input given a computer program and an input to the
program. The halting problem is a conceptual model in which there is no memory or time constraint
on program execution, and so it can take an arbitrary amount of time and use a large amount of system
storage space before halting.
In pseudo-code, for example, a program may run indefinitely in an infinite
loop or may come to a halt relatively quickly. As a result, the halting problem has been determined to
be algorithmically unsolvable [3,8]. This means that no method can be applied randomly to a
program as input to determine if it will stop when run with a specific input. A generic technique to
solve the halting problem for all potential program-input sets cannot exist, according to the Turing
machine [3]. Turing machines are abstract computational devices that have been presented objectively
to aid in examining the breadth and limitations of computational capabilities. Turing machines are the
most powerful computational machines, and they form the theoretical basis for modern computers [8,9]. The next §2.1 presents a common understanding of the halting problem’s operational principles.
2.1. A characteristic proof of the Halting impossibility
We set a straightforward interpretation of the problem as, given a random Turing machine \(M\) over the
expression \(\Sigma = \{x, y\}\), and a random string \(w\) over \(\Sigma\), does \(M\) halt when it is given \(w\) as an input? The
goal of this section is to characterize and show that the halting problem is not decidable, hence
unsolvable.
Claim 1.
The halting problem is undecidable and hence, unsolvable.
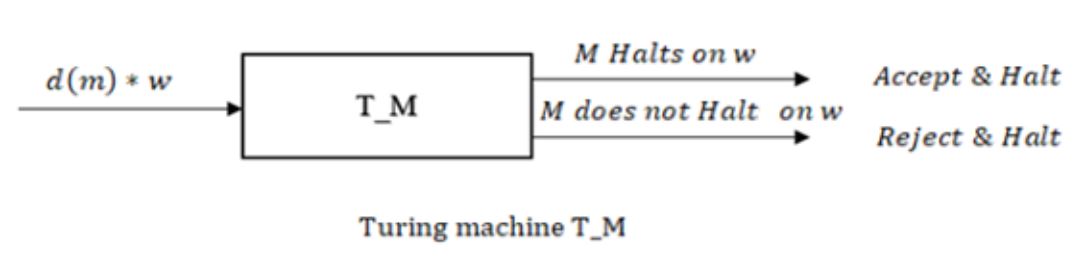
A Contradiction Assertion [10]: We establish an elementary proof by contradiction. We suppose that
the halting problem is decidable, implying that there is a Turing machine operational named \(T_M\) that
solves the halting problem. That is, given a description of a Turing machine \(M\) (expressible over \(\Sigma\))
and a string \(w\), \(T_M\) writes “True” if \(M\) halts on \(w\) and “False” if \(M\) does not halt on \(w\), and then
\(T_M\) halts. Consider Figure 1;
Figure 1. Basic Working Mechanism of Turing Machine.
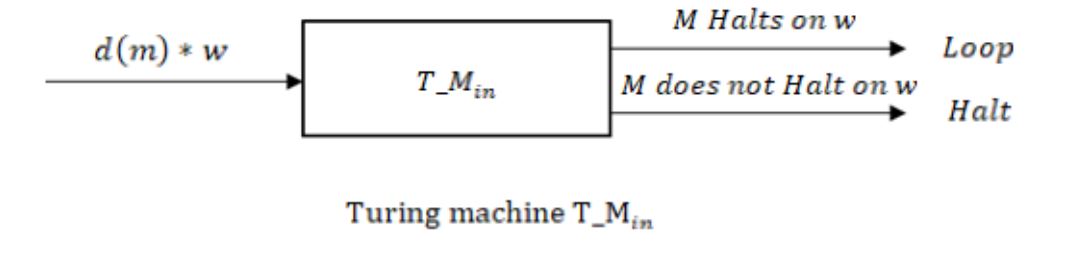
Let us now build the new Turing machine \(T_{M_{a}}\) shown in Figure 2. First, we create a Turing machine
\(T_{M_{m}}\) by adjusting the \(T_M\) depicted in Figure 1 so that if \(T_M\) accepts a string and halts, then
\(T_{M_{m}}\) goes into an infinite loop (\(T_{M_{m}}\) halts if the original \(T_M\) rejects a string and halts).
Figure 2. Basic Working Mechanism of Turing Machine.
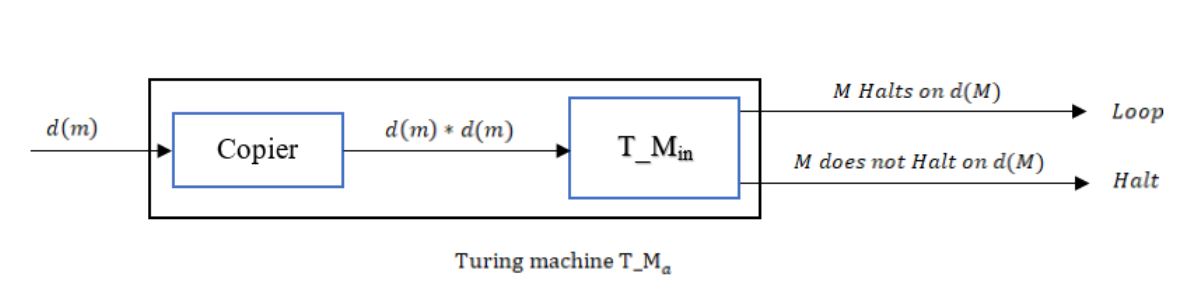
Then following (Figure 2 (\(T_{M_{m}}\))) we create another Turing machine \(T_{M_{a}}\) scheme shown in Figure 3 as: recall that a \(T_{M_{a}}\) takes as input a description of a Turing machine \(T_{M}\) expressed by \(d(M)\),
copies it to acquire the string \(d(M) \ast d(M)\), where \(\ast\) is a symbol that separates the two copies of \(d(M)\)
and then supplies \(d(M) \ast d(M)\) to the Turing machine \(T_{M_{m}}\).
Figure 3. Finite State Machine as a Turing Machine.
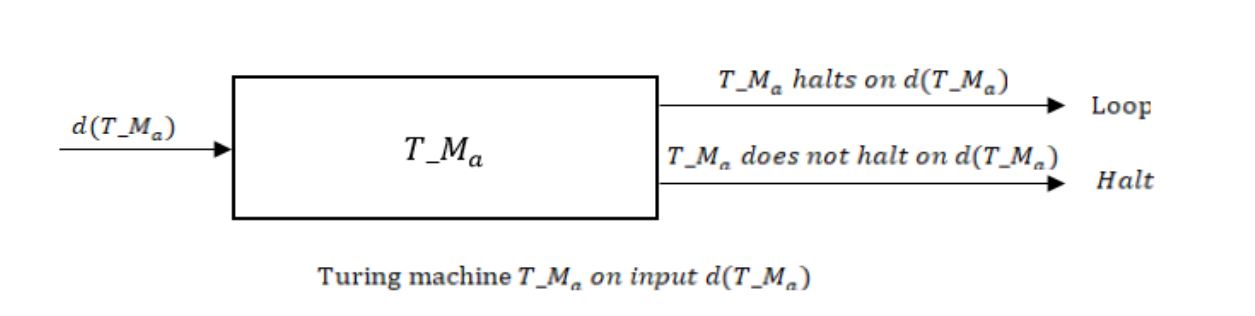
We examine how \(T_{M_{m}}\) operates when provided with a string describing \(T_{M_{m}}\) itself is given as
input. Considerably, when \(T_{M_{m}}\) gets the input \(d(T_{M_{m}}\)), it makes a copy, constructs the string
\(d(T_{M_{m}}) \ast d(T_{M_{m}})\) and gives it to the revised \(T_{M}\). Thus the modified \(T_{M}\) is described as the Turing
machine \(T_{M_{m}}\) and the string \(d(T_{M_{m}}\)) as depicted in Figure 4.
Figure 4. Genetic Characteristics of Turing Machine.
From Figure 2, the modified \(T_{M}\) would execute an infinite loop if \(T_{M_{a}}\) halts on \(d(T_{M_{a}}\)), and on
the opposite, it halts if \(T_{M_{a}}\) does not halt on \(d(T_{M_{a}}\)). In other terms, \(T_{M_{a}}\) goes into an infinite
loop if \(T_{M_{a}}\) halts on \(d(T_{M_{a}}\)) and it halts if \(T_{M_{a}}\) does not halt on \(d(T_{M_{a}}\)). This is a contradiction.
The contradiction has been assumed from the hypothesis that there is a Turing machine that solves the
halting problem. Hence such a supposition must be wrong. The following pseudo-proof is aimed at
clarifying the described hypothesis.
Elaborate Proof: The aim here is to establish an operational model fleshing out the exposed halting
impossibility characteristic proof. We start by assuming that the halting problem is solvable, which
implies that a solution algorithm exists. [6] states that a program \(X\) can be written as input to any
program \(P\) with data \(D\), and the program will determine whether \(P\) initiated on \(D\) ultimately halts. To
make a new program \(Y\), we append some commands (strictly, mathematical expressions) to \(X\). We let
\(Y\) modify \(X_{s}\) so that if \(X\) halts due to a decision that \(P\) started on \(D\) halts, \(Y\) goes into an infinite loop.
If \(X\) comes to a halt with the decision that \(P\) initiated on \(D\), then \(Y\) comes to a halt as well. Finally, we
make a new program called \(Z\) with the input \(P\). \(Z\) is defined so that it raises \(Y\) on program \(P\) with an
input corresponding to \(P\) (that is, the input data for \(Z\) is a program). There are two probable prospects
for explaining what happens when we run \(Z\) on \(Z\).
[6] \(Z\) started on input \(Z\) halts: If \(Z\) run on \(Z\) halts, then \(Y\) run on \(Z\) with input \(Z\) halts. If \(Y\)
executed on \(Z\) with input \(Z\) halts, then \(X\) decided that \(Z\) started on \(Z\) never halts! Therefore, \(Z\)
started on input \(Z\) halts implying that \(Z\) executed on input \(Z\) does not halt. This is a
contradiction.
\(Z\) started on input \(Z\) does not halt: If \(Z\) executed on \(Z\) does not halt, then \(Y\) run on \(Z\) with input
\(Z\) does not halt. If \(Y\) run on \(Z\) with input \(Z\) does not halt, then \(X\) decided that \(Z\) started on \(Z\)
halts! Therefore, \(Z\) run on input \(Z\) never halts implying that \(Z\) started on input \(Z\) halts. This
leads to a contradiction again.
Either alternative yields a contradiction, so the assumption that the halting problem is solvable must
be incorrect.
2.1.1. A genetic empirical characterization of the Halting problem
This section presents both the genetic and the physical characteristics of the halting problem by
examining the relationship between Turing Machines and modern-day general-purpose computers. In
specific, we will be focusing on the machinery functioning frameworks. A Turing Machine is similar
to a general-purpose computer in the following ways:
a) A Turing machine is made up of a “tape” of
cells and a single active cell called the “head”. The tape’s cells can be any color, and the head can be
in any condition. A rule specifies what the head should do at each step for each Turing machine. The
rule considers the state of the head as well as the color of the cell in which the head is located. Then it
describes what the head’s new state should be, the color it should “write” into the tape, and the direction
it should move in (either to the left or to the right). The initial color arrangement of cells on the tape
corresponds to the computer’s input. Both “program” and “data” can be included in this input. The
Turing machine’s steps correlate to the computer’s operation.
b) The Turing machine’s rules are
analogous to computer machine-code instructions. Each section of the rule indicates what “operation”
the computer should execute in response to a specific input. Turing Machines are distinguished from
modern general-purpose computers by their storage capacities. However, because Turing machines
have unlimited storage, we investigate the technical notion that the general-purpose computer is closer
to a “finite state machine (FSM)” than a Turing machine, based on the proven characteristic
similarities between the two machines. The presence of micro-transistors, which comprise the
computer’s major functional components, including computer memory, is important to the computer
as an FSM.
2.1.2. Functional characterization of computer Halting operations
As mentioned in the previous section, general-purpose computers are fundamentally binary systems
whose functioning principle is based on the working mechanisms of the constituent micro-transistors.
All information in a computer is conveniently binary coded (both numerical data and text data are
binary-coded).
The general-purpose computers use the micro-transistors states of either “High (True)”
or “Low (False)” which genetically correspond to the binaries “1” or “0” respectively, in controlling
the events between the background of the computer and the physical world. For instance;
i) in a color
image, every pixel is represented by three binary sequences that correspond to the three-pixel primary
colors (green, red, and blue). Each sequence encodes an expression (could be mainly numerical valued
expressions) that represents the intensity of the corresponding particular color in the pixel. These
sequences are then transmitted through a video driver program to millions of liquid crystals on the
computer screen, and translated into the hue that the eye observes.
ii) Sound signals are also stored in
binary form with help of a technique called pulse code modulation in which continuous sound waves
are digitized by taking snapshots of their respective amplitudes every few milliseconds. The
amplitudes are recorded as binary numbers which when read by the computer audio firmware,
respective numbers determine how quickly the coils in the speakers should vibrate thus creating sounds
of different frequencies.
From examples (i) and (ii), we deduce that physical activity such as recording
and playing audio signals from a computer is genetically based on the binary functional characteristics
of the computer. So such an activity is typically inherent, and not predetermined. This feature implies
that the amplitudes of the signals correspond to a sequence of \(1_{s}\) and \(0_{s}\) if the signal is not continuum,
and otherwise if continuum. We consider that for a program or a signal to be continuum, the computer
operations must only be based on a single characteristic invariant binary-based state (either \(1_{s}\) or \(0_{s}\))
and not both states. Computer programs are naturally designed to operate with respect to binary
characteristics. Considerably, the computer programs are distinct from an inherent mathematical
function in that they cannot be characterized as total mathematical functions from an initial state to a
final state without considerations of a time element. So inherently, computer programs have been
characterized as functions or relations with a time component. The characterization based on the time
element is responsible for non-termination in a computer program augmented as either a total function
or as a partial function. The time element may be as simple as a Boolean variable that distinguishes
finite from infinite time [5]. However, for physical interpretation, it can be a numeric variable extended
with an infinite value to account for the non-termination [1]. We proceed by exploring the working
principle of a (FSM) based on the binary system. We consider that given an arbitrary program and an
input, for the input to decide with success if the given program halts, both programs must have a similar
initial state (true or false). Otherwise, the input decides a non-terminating program. This conclusion is
based on the genetic understanding that the states \(1_{s}\) or \(0_{s}\) cannot represent similar computation in a
single event. For this reason, the halting problem would be impossible.
3. Establishing Euclidean geometric problems
The Euclidean geometric system (here we refer to the model established in the first six books of
Euclid’s Elements [11]) accentuates formalizing geometry using axioms, which appeal directly to basic
concepts of geometry such as points and lines as opposed to a background for objects such as Cartesian
spaces. For this paper, we in specific focus on the trisectability of angles posed by the ancient Greeks.
The problem of “angles trisection” asks that: given an arbitrary angle (specifically a plane angle [12]),
conceive a straightedge-compass scheme for sectioning the angle into three “equal” fractions. The
inherent angles trisectability statement asks for a fixed straightedge and compass scheme that works
for all plane angles. Further, the problem is restricted to some fundamental geometric conditions which
most people inadvertently violate in their attempts to trisect angles (we suppose that the illustrated
incompatibility schemes show the faults in employing analytic techniques as authoritative means for
proving the non-trisectability of angles. It is upon the non-trisectability proofs where the geometric
cryptographic protocols are established). It is expected that to resolve the trisection of angles one must
use straightedge compass techniques, the solution (proof) must not involve measurements, an attempt
at such a solution should not involve arithmetic, and that the geometric scheme must have a finite
construction step. All these restrictions are inherently in agreement with the arbitrary nature of
Euclidean geometric constructions. We consider that in solving the trisection of an angle, the size of
the given angle should not be known [7].
This observation rules out the validity of applying real
numbers as geometric magnitudes (a common practice characterizing the non-Euclidean geometric
proofs). For centuries, mathematicians, philosophers, and science scholars have wrestled with the
trisection of angles, till 1836 when first, the problem was vaguely stated as an impossible straightedgecompass problem; using ideas from the Galoi’s fields [13]. However, we retrofit that the stated nontrisectability proof for any angle is flawed and it does not exactly show the trisection problem as an
impossible problem. This work will employ a trisection scheme developed by [7]; to show the incompatibility between the angle trisection problem and the halting problem. The following §3.1 involves the genetic characterization of the angle trisection problem.
3.1. A characteristic proof of the angle trisection problem
A handy example to consider in this case is the geometric proof for the Pythagorean theorem
(illustrated by [7]). The genetic proof for the Pythagorean theorem typically involves establishing the
geometric relationship between magnitudes of similar kinds. In the proof, the is no application of real
numbers as a substitute for geometrically constructed magnitudes. We think the reason for this was to
preserve the purity of the Euclidean geometric system (in which real numbers play significant roles
that which is not a representation of geometric magnitudes). A characteristic proof of trisecting any
given angle must equally, follow the genetic rigor for establishing Euclidean geometric proofs. We
consider that, any proof based on the constructability of only those magnitudes expressible as relative
primes of the form \(a/b\) suggest an inherently non-Euclidean geometric generic property that given
straightedge and compass, any constructible magnitude should be expressible as a rational fraction.
Throughout §2, attempts have been made to characterize the existing geometric cryptographic
principles. We assert that neither of the available geometric cryptographic models suits the inherent
requirements for a Euclidean geometric proof. This is considered due to the nature of the proof for the
halting problem. In both theory and practice, the proof for the halting problem is shy off the rigor
required for typical straightedge and compass operations proofs. We thus carry on with the analytic
examination of the angles trisection scheme established in [7]. The focus here is to establish the
characteristic relations between the halting problem and the analytic nature of the angles nontrisectability proofs.
3.1.1. Characteristic analysis of the “AG-algorithm” solution
The “AG-Algorithm” provides a fixed system that works for any given angle. The scheme presents a
“mothoddiversity” framework in which results at any desired accuracy are possible. The principle goal
of this section is to provide a review characteristic of the “AG-Algorithm” algorithm using purely
algebraic approaches.
3.1.2. Algebraic equivalence of the “AG-algorithm” solution
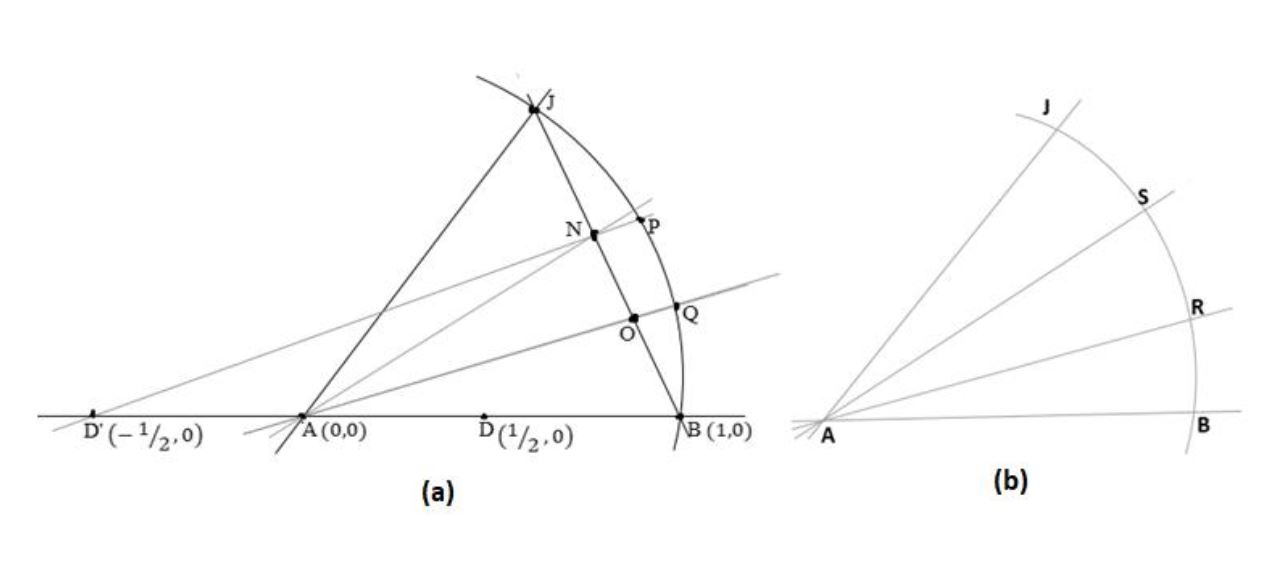
We consider Figure 5 adapted from [7] obtained following application of the “AG-Algorithm” on an
arbitrarily small-angle \(\angle JAB\) constructed in a unit circle with; \(A = (0,0), B = (1,0),\) and, \(J =(\cos\theta, \sin\theta)\).
Let the points \(O\) and \(N\) trisect the chord \(\overline{JB}\) such that \(|BO| = |ON| = |NJ|\).
We set points \(P\) and \(Q\) on the unit circle defined by the following equations:
\(P =\) Intersection of the line \(\overline{D’N}\) and the arc \(\overline{JB}\).
\(Q =\) Intersection of the line \(\overline{OA}\) and the arc \(\overline{JB}\).
Figure 5. AG-Algorithm Results Analysis (Figure adapted from [7])
Appendix (2(a)) [7] we assume a point of convergence upon which the trisection error the of chord
\(\overline{JB}\) (although for unlike in appendix 1 [7] which is constructed upon a more complex geometric scheme
appendix (2(a)) offers a simple analytic scheme for examining a specified angle which is not
inherently obtained through complex operations as established in appendix 1 [7]) corresponds to the
trisection error. Therefore, we reduce the trisection scheme depicted in Figure 5 (b)) to the assumption
based on Figure 5 (a)) on the trisectability of the curve \(\widehat{JB}\) so that \(\angle PAQ = \angle JAB/3\), implying \(\overline{PQ} =
\overline{BR} = \overline{RS} = \overline{SJ}\) and \(\widehat{PQ} = \widehat{BR} = \widehat{RS} = \widehat{SJ}\).
Thorough analysis is done with the aid of a MATLAB code to show that as in the case of \(n\)-sectioning of a straight line segment, the “AG-Algorithm” is an
exact trisection [7]. The subsequent argument concerns investigating if \(\angle PAQ = \theta/3\), where \(\theta=\angle JAB\). We initiate the investigation with the trisection of chord \(\overline{JB}\), which aids us in determining the
positions \(O\) and \(N\).
Claim 2.
Chord \(\overline{JB}\) is exactly trisected such that \(\overline{BO}\) = \(\overline{ON}\) = \(\overline{NJ}\).
Proof Proof of Claim 2.
Applying vector notation based analysis, we set:
From Eq. (1), when \(t = 0\) we get \(B = (1,0)\), and when \(t = 1\) we get \(J = (\cos\theta, \sin\theta)\). We
preserve the positions \(B\) and \(J\) for later use. Assuming that chord \(\overline{JB}\) is exactly trisected, we now set
\(t = \frac{2}{3}\) and solve for point \(N\) as:
\begin{align*}
&N = (1,0) + 2/3 (\cos\theta – 1, \sin\theta)\,,\\
&N = (1 + 2/3 \cos\theta – 2/3 , 2/3 \sin\theta)\,,\\
&N = (1/3 + 2/3 \cos\theta, 2/3 \sin\theta)\,.
\end{align*}
Again from Eq. (1), we put \(t = 1/3\) and solve for point \(O\) as follows:
\begin{align*}
&O = (1,0) + 1/3 (\cos\theta – 1, \sin\theta)\,,\\
&O = (1 + 1/3 \cos\theta – 1/3 , 1/3 \sin\theta)\,,\\
&O = (2/3 + 1/3 \cos\theta, 1/3 \sin\theta)\,.
\end{align*}
This proof assumes that since \(\overline{D’N}\) and \(\overline{OA}\) are parallel as established by [7] and that since points \(O\)
and \(N\) were obtained using similar plane geometric configurations, chord \(\overline{JB}\) is exactly trisected. Now
to compute the angle trisection errors, we have to determine the points \(\overline{D’N}\) and \(\overline{OA}\) on the circumference
of a unit circle. We proceed using points \(O\) and \(N\) in writing the line equations \(\overline{D’N}\) and \(\overline{OA}\) as follows:
To find the coordinates of the points \(P\) and \(Q\) we determine the points of intersections between lines
\(\overline{D’N}\) and \(\overline{OA}\) with the unit circle defined as:
To determine the dot product, we consider the trigonometric functions (cosine and sine) for an angle
of some magnitude (say \( \angle PAQ= 0.75^{\circ})\) at 15 decimals accuracy and the slopes \(a\) and \(b\) as follows;
\begin{align}
&\label{eq24}
c = \left(\cos\theta/2 + (\cos\theta)\right)\,.
\end{align}
(19)
Using Eqs (17) and (19) in Eqs (10) and (13), we obtain the coordinates of points \(P\) and \(Q\)
respectively. We then use in the cosine triple angle formula \(\cos(3\theta) = 4\cos^{3}(\theta) – 3\cos(\theta);\) the
variables \(a\) and \(b\) and the points \(P\) ad \(Q\) in determining the resulting angle trisection error. For
simplistic analysis, we employ the MATLAB script shown in (appendix 2 (a) [7]) which is based on the
condition:
\begin{equation*}
pi/(\theta \times 1000000000) \  with \  0 > \theta = pi/240.
\end{equation*}
Under this condition, the “AG-Algorithm” projects the most accurate to exact results depending on the
required accuracies limits.
4. The angle trisection-Halting problem analogy
The “angle trisection-halting problem” analogy of geometric cryptography is based on the notion that
it is easy to triple a given angle than it is to trisect such an angle. The geometric cryptography common
operations in the realm of symmetric cryptography functions assign the triple of a magnitude (say
angle) to a given angle. Hence, symmetric cryptography can be thought of as a one-way function in
which the only constructions permissible are those mimicking the ruler and compass constructions
workflows. This section aims at constructing a one-way geometric identification scheme that is then
used to characterize the “angle trisection-halting problem” impossibility analogy.
This section adopts the identification scheme suggested by [6,10]. The identification model is
probabilistic based on the tossing of a coin. Depending on the number the coin is flipped, the outcome
is “true” if and only if all the chances are “heads” and otherwise, if “tails” appear. We assume two
parties; Alex and June where Alex wishes to establish a means of proving his identity later to June.
4.1.1. Initialization of the identification scheme
Alex publishes a copy of an angle \(Y_{A}\) which is constructed by Alex as the triple of an angle \(X_{A}\) he has
constructed at random. Because trisecting an angle is impossible Alex is confident that he is the only
one who knows \(X_{A}\).
4.1.2. Working of the identification scheme
Alex gives June a copy of an angle \(R\) which he has constructed as the triple of an angle \(K\) that he has
selected at random. June flips a coin and tells Alex the result. If June says “heads” Alex gives June a
copy of the angle \(K\) and June checks that \(3 \ast K = R\). If June says “tails” Alex gives June a copy of
the angle \(L = K + X_{A}\) and June checks that \(3\ast L = R + Y_{A}\). The four steps are repeated \(t\) times
independently. June accepts Alex’s proof of identity only if all \(t\) checks are successful. This protocol
is an interactive proof of knowledge of the angle \(X_{A}\) (the identity of Alex) with error \(2^{-t}\).
4.2. Characteristic limitations of the “Angle trisection-Halting impossibility” analogy
Through §4.1 we note that although the “angle trisection-halting problem” analogy is typically
basic, this paper asserts that the concept is built upon a misconception. Consider the following
statements which expose the limitations exhibited by the “angle trisection-halting problem” analogy.
a The “angle trisection-halting problem” analogy assumes that the trisectability of an arbitrary
angle using compass and straightedge is inherently probabilistic. This perspective is incorrect
as it is built on the assumption of prior knowledge of the size of the resulting angles that trisect
a given angle (as well, a known angle) thus it is either “true” or the binary 1 when the trisection
is achieved, and “false” or the binary 0 otherwise. In contrast, the problem of angles trisection
requires no predetermined results, neither is the size of the trisectioned angle necessary in the
construction (established in §3)
b As illustrated using the (FSM), the halting problem is inherently characterized by the two
binary states (\(1_{s}\) and \(0_{s}\)) which determines the nature of a program (either halting or
continuum) and so the problem can never be solved since arbitrarily, computing events based
on either (\(1_{s}\) or \(0_{s}\)) cannot be inherently similar as \(1\neq 0\). From a geometric perspective, the
use of the states (\(1_{s}\) and \(0_{s}\)) assumes that binary 1 is geometrically reducible to binary 0. This
is an inconsistent cognitive meaning of the analogy which implies that a quantity of magnitude
1 is reducible to another quantity of magnitude 0 via compass and straightedge, thus deciding
the halting problem. The Euclidean geometric system forbids the application of real numbers
as geometric magnitudes, and thus sensible, being a practical model, the number 0 is not
allowed in straightedge and compass schemes.
c From §4.1.2, the error expression \(2^{-t}\) suffer two main limitations: (i) it assumes that an
angle could be trisected if the error is infinitely small because the more iterations there is, the
small the error (that is, the error decrease with increase in \(t\) values); (ii) it also assumes that
the exact trisection of an angle corresponds to infinitely repeated bisection steps in the interface
between the alternatives of the states (\(1_{s}\) and \(0_{s}\)). Contrary, it is possible to have a small angle
exactly trisected at \(t = 1\) (following the “AG-Algorithm” [7]), and this angle multiplied to the
desired fraction that leads to the trisection of a larger angle (this is an attribute of the “AGAlgorithm”). These limitations are further illustrated using the MATLAB code provided in
appendix (2 (a) [7]), where the trisection of the given angle is exact for the values of \(t\) with
respect to the sizes of the angles.
d Further, we consider from §4.1.2, the error expression \(2^{-t}\). The expression implies that
the geometric trisection of an angle corresponds to repeated bisections in the sense that if we
apply the \(t\) values sequentially in according to the number of iterations such that \(t =
1, 2, 3, 4, 5, 6, 7;\) we obtain the corresponding decreasing error results as; \(t =
0.5 0.25 0.125 0.0625 0.03125 0.015625 0.0078125\) (the resulting angle is half of the
previous angle). This is the misconception exposed by relating the trisection of an angle and
solving the halting problem. The problem of angles trisection does not ask for approximate
solutions regarding repeated bisections operations.
5. Discussion
Regarding the physical significance of the problems; the halting problem is characterized by a time
component which may be based on a Boolean variable that distinguishes finite from infinite time [10],
or it can be based on a numeric variable (such as integers) extended with an infinite value to account
for non-termination [1]. On the other hand, the trisection of an arbitrary angle problem requires
typically, a plane geometric scheme that sections any given angle into three equal fractions. It has been
established that the Euclidean geometric system allows only those operations mimicking straightedge
and compass rigor of constructions. Although in cryptographic schemes the ordinary practical
straightedge and compass constructions are not exhibited, here we concern ourselves with the
principles behind the “angles trisectability-halting problem” analogy. We begin by asserting that
strictly, Euclidean geometric problems are not time-bound, and so is the trisectability of angles. The
notion that the trisection of an angle in general requires infinite construction steps is a misconstruction
of the inherent characteristics of the problem. Indeed, the notion suggests approximate solutions for
angle trisection based on multiple bisections of a given angle. This view completely violates the
standard notion of Euclidean geometric exactness as provided by [14].
Further, the characteristic non-Euclidean proofs (as modeled in cryptographic applications) introduce time and resource requirements
for the problem of angles trisection. Indeed, it is one of the fundamental reasons that the practical
trisectability of an angle via straightedge and compass operations correspond to the infinite geometric
bisection of a plane angle. This notion is an evident characteristic feature of the elliptic curve
cryptographic (ECC) applications [1,15]. For instance, in §4.1.2 the iteration error expression
\(2^{-t}\) is signify that no single instance the trisection of an angle could be numerically exact, or that the
trisection accuracy of an angle increase with the increase in the number of iterations via repeated
geometric operations of bisecting a magnitude. Nonetheless, we treat such reasoning as elusive and an
invalid notion about the trisectability of angles. Further, the anticipation that a trisection is achievable
if all results are “heads” impose a genetic Euclidean restriction which Euclid himself has not
demonstrated through the Elements. §4.1.1 has outlined some of the possible limitations of the
“angle trisection-halting problem” impossibility analogy which makes it an invalid concept for
application of cryptographic principles in information processing. Further, the pseudo-codes in
appendix (1 [7]), appendix (2 (a) [7]), and appendix (2 (b) [7]) expose that the trisection of any angle
is possible given the treatment suggested is using the probabilistic error \(2^{-t}\) for \(t\) iterations of a
program; in which the error \(2^{-t}\) corresponds to some degree of accuracy. To this effect, we observe
that the genetic differences between the two problems (“angle trisection-halting problem”) make them
incompatible and thus invalidating the geometric cryptography concepts.
6. Conclusion
Throughout the provided review, we note that there is no genetic and physical relationship between
the geometric trisection of an arbitrary angle and the halting problem. Thus, the focus of the paper has
been achieved; to create an inherent demarcation between the theory of Euclidean plane geometry and
the computability theory by breaking the (“angle trisection-halting problem”) impossibility analogy.
Since the trisection of any angle or any curve that subtends a given angle is reasonably, geometrically
possible [7], the (“angle trisection-halting problem”) analogy is fully invalidated. We, therefore, assert
that the concept of geometric cryptography is genetically faulty and thus it should not be used as an
important subject for cryptographic techniques as it provides weak geometric frameworks that can be
easily broken during information transmissions between entities.
Author Contributions:
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Conflicts of Interest:
”The authors declare no conflict of interest.”
References:
Gaur, P., & Singh, P. (2013). A review of geometry based symmetric key encryption using ellipse. International Journal of Computer Science and Mobile Computing, 2(6), 1-6. [Google Scholor]
Chen, H., & Cramer, R. (2006, August). Algebraic geometric secret sharing schemes and secure multi-party computations over small fields. In Annual International Cryptology Conference (pp. 521-536). Springer, Berlin, Heidelberg. [Google Scholor]
Church, A. (1937). AM Turing. On computable numbers, with an application to the Entscheidungs problcm. Proceedings of the London Mathematical Society, 2 s. vol. 42 (1936-1937), pp. 230-265. The Journal of Symbolic Logic, 2(1), 42-43. [Google Scholor]
PGaur, P., & Singh, D. P. (2013). Geometry based symmetric key cryptography using ellipse. International Journal of Application or Innovation in Engineering & Management, 2(6), 37-44. [Google Scholor]
Burmester, M., Rivest, R., & Shamir, A. (1997). Geometric cryptography: Identification by angle trisection. https://citeseerx.ist.psu.edu/viewdoc/download;jsessionid=D0128CE747411B22666180F3395AB94F?doi=10.1.1.55.5432&rep=rep1&type=pdf. [Google Scholor]
Alex, K. M. The independence of euclidean geometric system: A proof on the constructability of geometric magnitudes. [Google Scholor]
Lin, S., & Rado, T. (1965). Computer studies of Turing machine problems. Journal of the ACM, 12(2), 196-212. [Google Scholor]
Minsky, M. L. (1961). Recursive unsolvability of Post’s problem of “tag” and other topics in theory of Turing machines. Annals of Mathematics, 74(3), 437-455.[Google Scholor]
Rompel, J. (1990, April). One-way functions are necessary and sufficient for secure signatures. In Proceedings of the Twenty-Second Annual ACM Symposium on Theory of Computing (pp. 387-394). [Google Scholor]
Euclid. Euclid’s Elements (Joyce, David E., Tran.). http://aleph0.clarku.edu/~djoyce/java/elements/elements.html. [Google Scholor]
“Euclid’s Elements, Book I, Definition 8.” https://mathcs.clarku.edu/~djoyce/elements/bookI/defI8.html. (accessed Nov. 26, 2021). [Google Scholor]
Wantzel, P. L. (1837). Recherches sur les moyens de reconnaître si un problème de géométrie peut se résoudre avec la règle et le compas. éditeur Inconnu, 366-372. [Google Scholor]