This work presents study on regularized and non-regularized versions of perceptron learning and least squares algorithms for classification problems. The Fréchet derivatives for least squares and perceptron algorithms are derived. Different Tikhonov’s regularization techniques for choosing the regularization parameter are discussed. Numerical experiments demonstrate performance of perceptron and least squares algorithms to classify simulated and experimental data sets.
Keywords: Classification problem, linear classifiers, least squares algorithm, perceptron learning algorithm, Tikhonov’s regularization.
1. Introduction
Machine learning is a field of artificial
intelligence which gives computer systems the ability to ”learn”
using available data.
Recently machine learning algorithms become very popular for analyzing
of data and make prediction [1,2,3,4].
Linear models for classification is a part of supervised learning
[1]. Supervised learning is machine learning task of learning a
function which transforms an input to an output data using available
input-output data. In supervised learning, every example is a pair
consisting of an input object (typically a vector) and a desired
output value (also called the supervisory signal). A supervised
learning algorithm analyzes the training data and produces an inferred
function, which can be used then for analyzing of new examples.
Supervised Machine Learning algorithms include linear and logistic
regression, multi-class classification, decision trees and support
vector machines. In this work we will concentrate attention on study
the linear and logistic regression algorithms.
Supervised learning problems are further divided into Regression and
Classification problems. Both problems have as goal the construction
of a model which can predict the value of the dependent
attribute from the attribute variables. The difference between these two
problems is the fact that the attribute is numerical for
regression and logical (belonging to class or not) for
classification.
In this work are studied linear and polynomial classifiers, more
precisely, the regularized versions of least squares and perceptron
learning algorithms. The WINNOW algorithm for classification is also
presented since it is used in numerical examples of Section 6 for comparison of different classification
strategies. The classification problem is formulated as a
regularized minimization problem for finding optimal weights in the
model function. To formulate iterative gradient-based classification
algorithms the Fréchet derivatives for the non-regularized and
regularized least squares algorithms are presented. The Fréchet
derivative for the perceptron algorithm is also rigorously derived.
Adding the regularization term in the functional leads to the optimal
choice of weights such that they make a trade-off between observed
data and obtaining a minimum of this functional. Different rules are
used for choosing the regularization parameter in machine learning,
and most popular are early stopping algorithm, bagging and dropout
techniques [5], genetic algorithms [6], particle
swarm optimization [7,8], racing algorithms [9]
and Bayesian optimization techniques [10,11]. In this work
are presented the most popular a priori and a posteriori Tikhonov’s
regularization rules for choosing the regularization parameter in the
cost functional.
Finally, performance of non-regularized versions of all classification
algorithms with respect to applicability, reliability and efficiency
is analyzed on simulated and experimental data sets [12,13].
The outline of the paper is as follows. In Section 2 are
briefly formulated non-regularized and regularized classification
problems. Least squares for classification are discussed in Section
3. Machine learning linear and polynomial classifiers are
presented in Section 4. Tikhonov’s methods of regularization
for classification problems are discussed in Section
5. Finally, numerical tests are presented in Section
6.
2. Classification problem
The goal of regression is to predict the value of one or more
continuous target variables \(t=\{t_i\}, i=1,…,m\) by knowing the values of input vector \(x=\{x_i\}, i=1,…,m\). Usually, classification algorithms are working well for linearly separable data sets.
Definition 1.
Let \(A\) and \(B\) are two data sets of points in an \(n\)-dimensional
Euclidean space. Then \(A\) and \(B\) are linearly separable if there
exist \(n + 1\) real numbers \(\omega_1, …, \omega_n, l\) such that
every point \(x \in A\) satisfies \(\sum _{i=1}^{n}\omega_{i} x_{i} > l\)
and every point \(x \in B\) satisfies \(\sum _{i=1}^{n}\omega_{i} x_{i} <
-l\).
The classification problem is formulated as follows:
Suppose that we have data points \(\{x_i\}, i=1,…,m\) which
are separated into two classes \(A\) and \(B\). Assume that these
classes are linearly separable.
Our goal is to find the decision line which will separate these
two classes. This line will also predict in which class will
the new point fall.
In the non-regularized classification problem the goal is to find optimal weights \(\omega=(\omega_1,…,\omega_M)\), \(M\) is the number of weights, in the functional
with \(m\) data points. Here, \( t =\{t_i\}, i = 1,…,m\), is the target function with known values, \( y(\omega) = \{ y_i(\omega)\} := \{ y(x_i, \omega)\}, i = 1,…,m\), is the classifiers model function.
To find optimal vector of weights \(\omega = \{\omega_i\}, i=1,…,M\) in the regularized classification problem,
the regularization term is added to the functional (1):
Here, \(\gamma\) is the regularization parameter, \(\| \omega \|^2 = \omega^T \omega = \omega_1^2 + … + \omega_M^2\), \(M\) is the number of weights.
In order to find the optimal weights in (1) or in (2),
the following minimization problem should be solved
The Fréchet derivative of the functional (1) is obtained by taking \(\gamma=0\) in (7).
To find optimal vector of weights \(\omega = \{\omega_i\}, i=1,…,M\)
can be used the Algorithm 1 as well as least squares or machine learning algorithms.
For computation of the learning rate \(\eta\) in the Algorithm 1 usually is used optimal rule which can be derived
similarly as in [14]. However, as a rule take \(\eta=0.5\) in
machine learning classification algorithms [4]. Among all other
regularization methods applied in machine learning [5,6,7,8,9,10,11], the
regularization parameter \(\gamma\) can be also computed using the Tikhonov’s
theory for inverse and ill-posed problems by different algorithms
presented in [15,16,17,18,19]. Some of these
algorithms are discussed in Section 5.
3. Least squares for classification
The linear regression is similar to the solution of linear least
squares problem and can be used for classification problems appearing in
machine learning algorithms. We will revise solution of linear least squares
problem in terms of linear regression.
Here, \(\omega = \{ \omega_i \}, i=0,…, M\) are weights with bias parameter \(\omega_0\), \(\{x_i\}, i=1,…, M\)
are training examples. Target values (known data) are \(\{t_i\}, i=1,…,N\) which correspond to \(\{x_i\}, i=1,…,M\). Here, \(M\) is the number of weights and
\(N\) is the number of data points.
The goal is to predict the value of \(t\) in (1) for a
new value of \(x\) in the model function (8).
and the regression problem (or the least squares problem) is written as
\begin{equation}
\label{linmod7}
\min_{\omega} \frac{1}{2} \| r(\omega)\|_2^2 = \min_{\omega} \frac{1}{2} \| A \omega – t \|_2^2,
\end{equation}
(14)
where \(A\) is of the size \(N \times M\) with \(N > M\), \(t\) is the target
vector of the size \(N\), and \(\omega\) is vector of weights of the
size \(M\).
To
find minimum of the error function (10) and derive the normal
equations, we look for the \(\omega\) where the gradient of the norm
\(\| r(\omega)\|_2^2 = ||A \omega – t||^2_2
= (A\omega – t)^T(A\omega – t)\) vanishes, or where \((\|r(\omega) \|_2^2)’_\omega =0\).
To derive the
Fréchet derivative, we consider the difference
\(\| r(\omega + e)\|_2^2 – \| r(\omega)\|_2^2\) and single out the linear part with respect to \(\omega\). More precisely, we get
Thus, the first term in (15) must also be zero, and thus,
\begin{equation}
\label{linmod9}
A^T A \omega = A^T t
\end{equation}
(17)
Equations (17)
is a symmetric linear system of the \(M \times M \)
linear equations for \(M\) unknowns called normal equations.
Using definition of the residual in the functional
\begin{equation}
\frac{1}{2} \|r(\omega) \|^2_2 = \frac{1}{2} \| A \omega – t \|_2^2
\end{equation}
(18)
can be computed the Hessian matrix \(H = A^T A\).
If the Hessian matrix \(H = A^T A\) is positive definite, then \(\omega\) is
indeed a minimum.
Lemma 1.
The matrix \(A^T A\) is positive definite if
and only if the columns of \(A\) are linearly independent, or when \(rank(A)=M\) (full rank).
Proof.
We have that \(dim(A) = N \times M\), and thus, \(dim(A^T A) = M \times M\).
Thus, \(\forall v \in R^M\) such that \(v \neq 0\)
\begin{equation}
v^T A^T A v = (A v)^T (Av) = \| Av\|_2^2 \geq 0.
\end{equation}
(19)
For positive definite matrix \(A^TA\) we need to show that \(v^T A^T A v > 0\).
Assume that \(v^T A^T A v = 0\).
We observe that \(A v = 0\) only if the linear combination \(\sum_{i=1}^M a_{ji} v_i = 0\). Here, \(a_{ji}\) are elements of row \(j\) in \(A\).
This will be true only if columns of \(A\) are linearly dependent or when \(v=0\), but this is contradiction with assumption \(v^T A^T A v = 0\) since \(v \neq 0\) and thus, the columns of \(A\) are linearly independent and \(v^T A^T A v > 0\).
The final conclusion is that if the matrix \(A\) has a full rank
(\(rank(A)=M\)) then the system (17) is of the size
\(M\)-by-\(M\) and is symmetric positive definite system of normal
equations. It has the same solution \(\omega\) as the least squares
problem \( \min_\omega \|A \omega – t\|^2_2\) and can be solved
efficiently via Cholesky decomposition [20].
3.2. Regularized linear regression
Let now the matrix \(A\) will have entries \(a_{ij} = \phi_j(x_i),
i=1,…,N; j = 1,…,M\).
Recall, that functions \(\phi_j(x), j = 0,…,M\) are called basis functions which should be chosen and are known.
Then the regularized least squares problem
takes the form
To minimize
the regularized squared residuals (20)
we will again derive the normal
equations. Similarly as was derived the
Fréchet derivative for the non-regularized regression problem (14), we look for the \(\omega\) where the gradient of
\(\frac{1}{2} ||A \omega – t||^2_2 + \frac{\gamma}{2} \| \omega \|_2^2
= \frac{1}{2} (A\omega – t)^T(A\omega – t) + \frac{\gamma}{2} \omega^T \omega\) vanishes. In other words, we consider
the difference
\( (\| r(\omega + e)\|_2^2 + \frac{\gamma}{2} \| \omega + e \|_2^2) – (\| r(\omega)\|_2^2 + \frac{\gamma}{2} \| \omega \|_2^2)\), then single out the linear part with respect to \(\omega\) to obtain:
The expression above means that the factor
\(A^TA \omega – A^T t + \gamma \omega \) must also be zero, or
\(
(A^T A + \gamma I) \omega = A^T t,
\)
where \(I\) is the identity matrix.
This is a system of \(M\) linear equations for \(M\) unknowns, the normal equations
for regularized least squares.
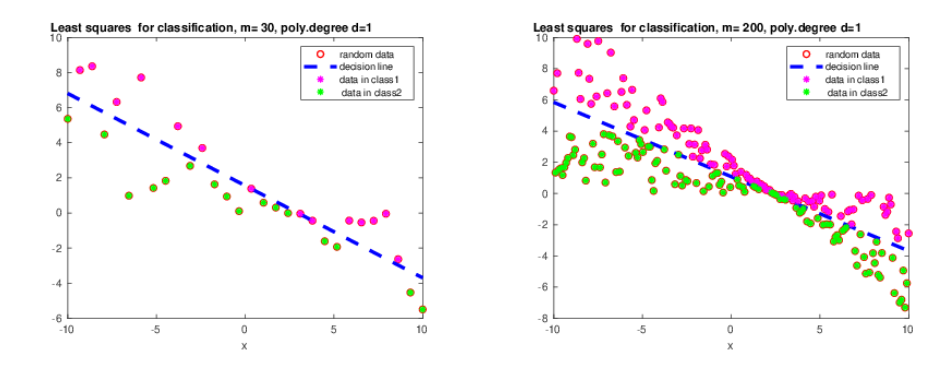
Figure 1. Least squares for classification.
Figure 1 shows that the linear regression or least squares minimization
\(\min_\omega \| A \omega – t\|_2^2\) for classification is working fine when it is
known that two
classes are linearly separable. Here the linear model equation in the problem (12) is
\begin{equation}
\label{plmodel0}
f(x,y,\omega) = \omega_0 + \omega_1 x + \omega_2 y
\end{equation}
(23)
and the target values of the vector \(t=\{t_i\}, i=1,…,N\) in (12) are
3.3. Polynomial fitting to data in two-class model
Let us consider the least squares classification in the two-class
model in the general case. Let the first class consisting of \(l\)
points with coordinates \((x_i, y_i), i=1,…,l\) is described by it’s
linear model
Here, basis functions are \(\phi_j(x), j = 1,…,n\).
Our goal
is to find the vector of parameters \(c= c_{i,1} = c_{i,2}, i=1,…,n\)
of the size \(n\) which will fit best
to the data \(y_i, i=1,…,m, m=k+l\) of both model functions, \(f_1(x_i, c), i=1,…,l\)
and \(f_2(x_i, c), i=1,…,k\) with \(f(x,c) = [f_1(x_i, c), f_2(x_i,c)]\)
such that the minimization problem
\begin{equation}
\label{ch9_3}
\min_{c} \| y – f(x, c) \|_2^2 = \min_{c} \sum_{i=1}^m ( y_i – f(x_i, c))^2
\end{equation}
(28)
is solved with \(m=k+l\).
If the function \(f(x, c)\) in (28) is linear then we can reformulate
the minimization problem (28) as the following least squares problem
\begin{equation}
\label{ch9_4}
\min_{c} \| Ac – y \|_2^2,
\end{equation}
(29)
where
the matrix \(A\)
in the linear system
\begin{equation*}
Ac=y
\end{equation*}
will have entries \(a_{ij} = \phi_j(x_i), i=1,…,m; j = 1,…,n\),
i.e. elements of the matrix \(A\) are created by basis functions
\(\phi_j(x), j = 1,…,n\).
Solution of (29) can be found by the method of normal equations
derived in Section 3.1:
\begin{equation}
\label{lsm}
c = (A^T A)^{-1} A^T b = A^+ b
\end{equation}
(30)
with pseudo-inverse matrix \(A^+ := (A^T A)^{-1} A^T\).
For creating of elements of \(A\) different basis functions can be chosen.
The polynomial test functions
have been considered in the problem of fitting to a polynomial in examples presented in Figures 2.
The
matrix \(A\) constructed by these basis functions is a Vandermonde
matrix, and problems related to this matrix are
discussed in [20].
Linear splines (or hat functions) and bellsplines
also can be used as basis functions [20].
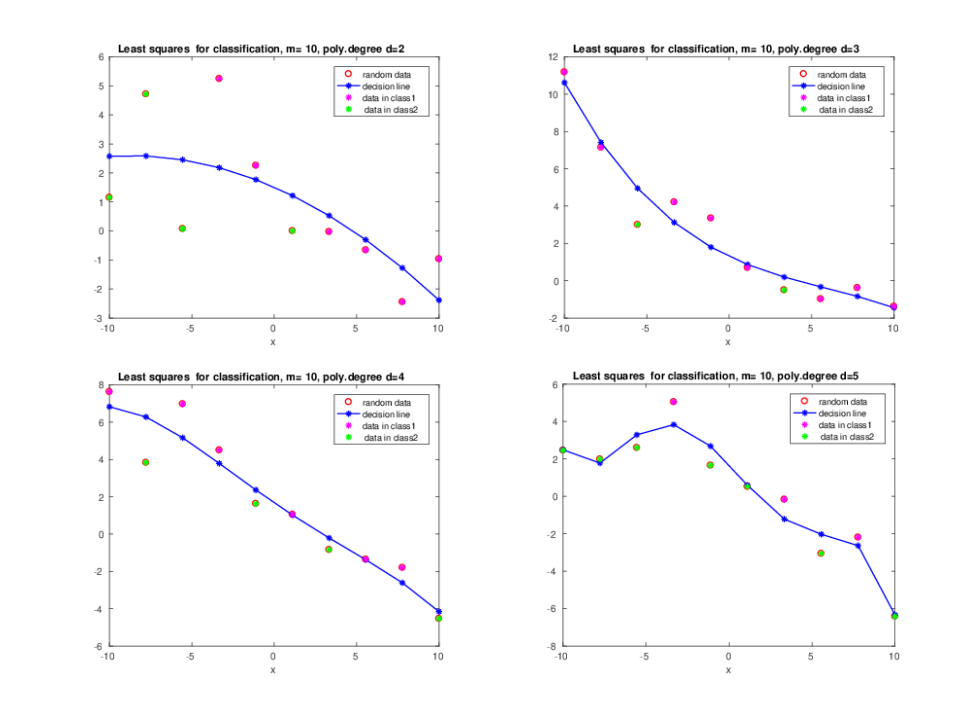
Figures 2 present examples of polynomial fitting to data for
two-class model with \(m=10\) using basis functions \(\phi_j(x) =x^{j-1},
j=1,…,d\), where \(d\) is degree of the polynomial. Using these
figures we observe that least squares fit data well and even can
separate points in two different classes, although this is not always the case.
Higher degree of polynomial separates two classes
better. However, since Vandermonde’s matrix can be ill-conditioned for
high degrees of polynomial, we should carefully choose appropriate
polynomial to fit data.
Figure 2. Least squares in polynomial fitting to data for different polynomials defined by (31).
4. Machine learning linear and polynomial classifiers
In this section we will present the basic machine learning algorithms
for classification problems: perceptron learning and WINNOW
algorithms. Let us start with considering of an example:
determine the decision line for points presented in Figure
3. One example on this figure is labeled as positive class, another one as
negative. In this case, two classes are separated by the linear
equation with three weights \(\omega_i, i=1,2,3\), given by
\begin{equation}
\label{ml1}
\omega_1 + \omega_2 x + \omega_3 y = 0.
\end{equation}
(33)
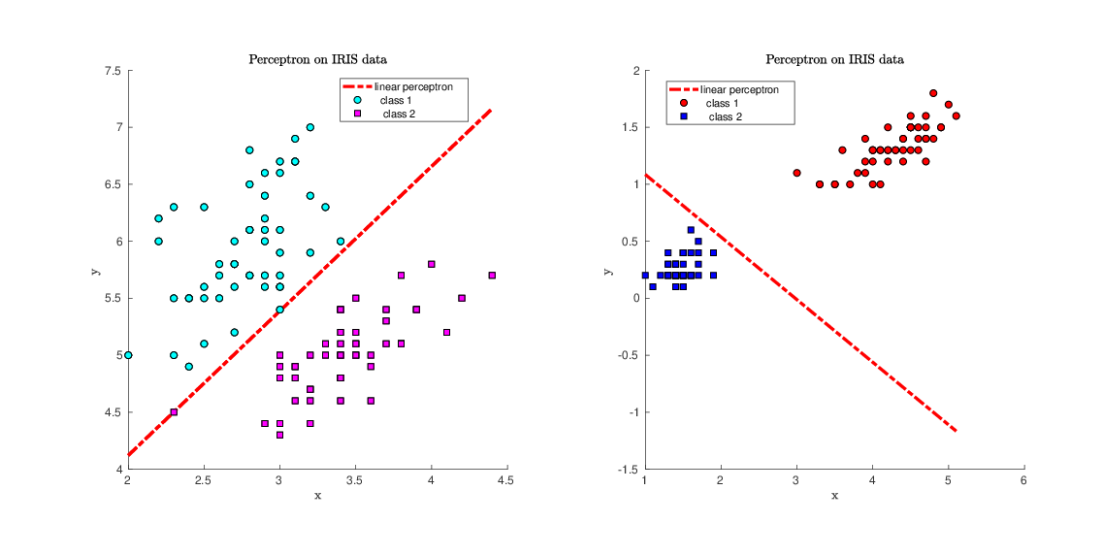
Figure 3. Decision lines computed by the perceptron learning algorithm for separation of two classes using Iris dataset [12].
In common case, two classes can be separated by the general equation
\begin{equation}
\omega^T x = \sum_{i=0}^n \omega_i x_i = 0
\end{equation}
(35)
with \(x_0=1\).
If \(n=2\) then the above equation defines a line, if \(n=3\) – plane, if \(n>3\) – hyperplane.
The problem is to determine weights \(\omega_i\) and the task of machine
learning is to determine their appropriate values. Weights \(\omega_i,
i=1,…,n\) determine the angle of the hyperplane, \(\omega_0\) is
called bias and determines the offset, or the hyperplanes distance from
the origin of the system of coordinates.
4.1. Perceptron learning for classification
The main idea of perceptron is binary classification.
The perceptron computes a sum of weighted inputs
When weights are computed, the linear classification boundary is defined by
\begin{equation*}
h(x,\omega) = \omega^T x = 0.
\end{equation*}
Thus, the perceptron algorithm determines weights in (36)
via binary classification (37).
Binary classifier \(y(x,\omega)\) in (37)
decides whether or not an input \(x\) belongs to some specific class:
where \(\omega_0\) is the bias. The bias does not depend on the input
value \(x\) and shifts the decision boundary. If the learning sets are
not linearly separated the perceptron learning algorithm does not
terminate and will never converge and
classify data properly, see Figure 7-a).
The algorithm which determines weights in (36) via binary
classification (37) can be reasoned by minimization of the
regularized residual
where \(\xi_\delta(x)\) for a small \(\delta\) is a data compatibility
function to avoid discontinuities which can be defined similarly with
[21] and \(\gamma\) is the regularization parameter. Taking \(\gamma=0\)
algorithm will minimize the non-regularized residual (39).
Alternative,
it can be minimized the residual
over the set \(M \subset
\{ 1,…, m\} \) of the currently miss-classified patterns which is simplified for the case of the perceptron algorithm to the minimization of the following residual
with
\begin{equation*}
|- t_i h_i|_+ = \max (0,- t_i h_i ), i = 1,…,m.
\end{equation*}
The Algorithm 2 presents
the regularized perceptron learning algorithm where
in update of weights (32) was used the following regularized functional
We finally get
\begin{equation*}
\begin{split}
0 = {\displaystyle \lim_{\|e\| \rightarrow 0}}
-\dfrac{x^T e( t – y(x,\omega)) ~\xi_\delta(x)}{||e||_2} + \dfrac{\gamma e^T \omega }{||e||_2}.
\end{split}
\end{equation*}
The expression above means that the factor
\(- x^T ( t – y(x,\omega)) ~\xi_\delta(x) + \gamma \omega \) must also be zero, or
The non-regularized version of the perceptron
Algorithm 2 is obtained taking \(\gamma=0\) in (45).
4.2. Polynomial of the second order
Coefficients of polynomials of the second order can be obtained by the same technique as coefficients for linear classifiers.
The second order polynomial function is:
This polynomial can be converted to the linear classifier if we introduce notations:
\[
z_1 = x_1, z_2=x_2, z_3= x_1^2, z_4 = x_1 x_2, z_5= x_2^2.
\]
Then equation (46) can be written in new variables as
which is already the linear function. Thus, the Perceptron learning
Algorithm 2 can be used to determine weights \(\omega_0, …, \omega_5\) in
(47).
Suppose that weights \(\omega_0, …, \omega_5\) in
(47) are computed. To present the decision line one
need to solve the following quadratic equation for \(x_2\):
Thus, to present the decision line for polynomial of the second order,
first should be computed weights \(\omega_0, …, \omega_5\), and then
the quadratic equation (49) should be solved the
solutions of which are
given by (51). Depending on the classification problem
and set of admissible parameters for classes, one can then decide which
one classification line should be presented, see examples in section
6.
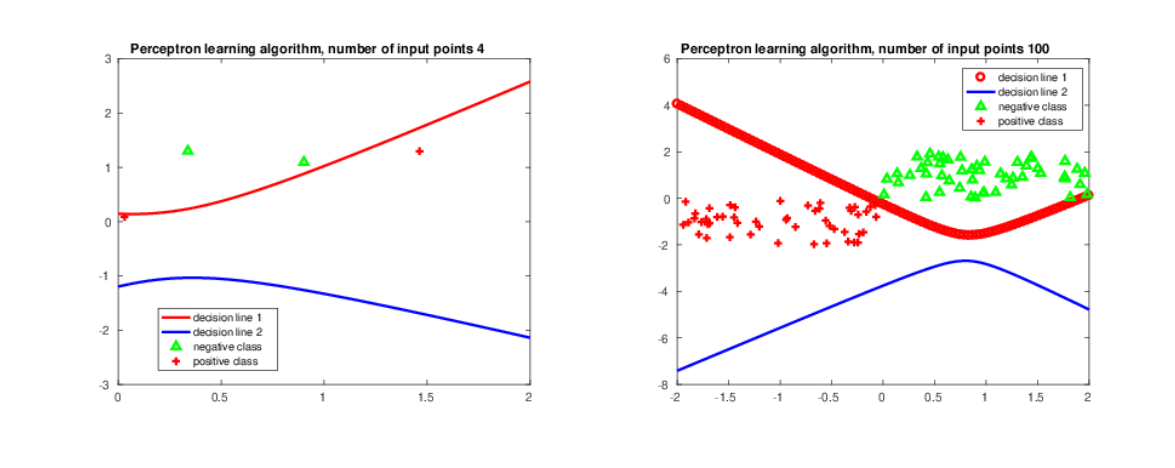
Figure 4. Perceptron learning algorithm for separation of two classes by polynomials of the second order.
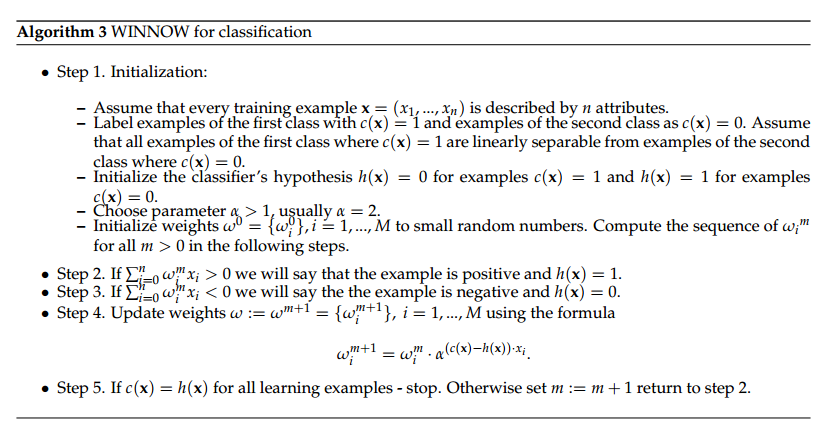
4.3. WINNOW learning algorithm
To be able compare perceptron with
other machine learning algorithms, we present here one more learning
algorithm which is very close to the perceptron and called WINNOW. Here is described the simplest version of this
algorithm without regularization. The regularized version of WINNOW
is analyzed in [22]. Perceptron learning algorithm uses
additive rule in the updating weights, while WINNOW algorithm uses
multiplicative rule: weights are multiplied in this rule. The WINNOW
algorithm Algorithm 3 is written for \(c=t\) and \(y=h\) in (45). We
will again assume that all examples where \(c(\textbf{x})=1\) are
linearly separable from examples where \(c(\textbf{x})=0\).
5. Methods of Tikhonov’s regularization for classification problems
To solve the regularized classification problem the regularization
parameter \(\gamma\) can be chosen by the same methods which are used
for the solution of ill-posed problems. For different Tikhonov’s
regularization strategies we refer to [15,16,17,18,19,23]. In this section we will present main
methods of Tikhonov’s regularization
which follows ideas of
[15,16,17,19,23].
Definition 2.
Let \(B_{1}\) and \(B_{2}\) be two Banach
spaces and \(G\subset B_{1}\) be a set. Let \(y:G\rightarrow B_{2}\)
be one-to-one. Consider the equation
where \(t\) is the target function and \(y(\omega)\) is the model function in the classification problem.
Let \(t^{\ast }\) be the noiseless target function in equation (52) and \(\omega^{\ast }\) be the ideal noiseless weights corresponding to
\(
t^{\ast }, ~y(\omega^{\ast }) = t^{\ast}\). For every \(\delta \in \left(
0,\delta _{0}\right), ~\delta _{0}\in \left(
0,1\right) \) denote
\begin{equation*}
K_{\delta }( t^{\ast }) = \left\{ z\in B_{2}:\left\Vert z- t^{\ast
}\right\Vert _{B_{2}}\leq \delta \right\}.
\end{equation*}
Let \(\gamma >0\) be a parameter and \(R_{\gamma}:K_{\delta _{0}}(t^{\ast}) \rightarrow G\) be a continuous operator depending on the
parameter \(\gamma\). The operator \(R_{\gamma }\) is called the
regularization operator for (52)
if there exists a
function \(\gamma_0 \left( \delta \right) \) defined for \(\delta \in \left(
0,\delta _{0}\right) \) such that
\begin{equation*}
\lim_{\delta \rightarrow 0} \left\Vert R_{\gamma_0 \left( \delta \right)
}\left( t_{\delta }\right) – \omega^{\ast }\right\Vert _{B_{1}}=0.
\end{equation*}
The parameter \(\gamma\) is called the regularization parameter and the
procedure of constructing the approximate solution \(\omega_{\gamma(
\delta)} = R_{\gamma(\delta) }(t_{\delta })\) is called the
regularization procedure, or simply regularization.
One can use different regularization procedures for the same
classification problem. The regularization parameter \(\gamma\) can
be even the vector of regularization parameters depending on number of
iterations in the used classification method, the tolerance chosen by the user, number of classes, etc..
For two Banach spaces \(B_{1}\) and \(B_{2}\) let \(Q\) be another
space, \(Q\subset B_{1}\) as a set and \(\overline{Q}=B_{1}\). In
addition, we assume that \(Q\) is compactly embedded in \(B_{1}.\) Let
\(G\subset B_{1}\) be the closure of an open set\(.\) Consider a
continuous one-to-one function \(y:G\rightarrow B_{2}.\) Our goal is to
solve
\begin{equation}
y( \omega) = t,~~ \omega\in G. \label{1.37}
\end{equation}
\begin{equation*}
J_{\gamma}: G\rightarrow \mathbb{R},
\end{equation*}
where \(\gamma = \gamma(\delta) >0\) is a small regularization
parameter.
The regularization term \(\frac{\gamma}{2} \psi(\omega) \) encodes
a priori available information about the unknown solution such that sparsity,
smoothness, monotonicity, etc… Regularization term \( \frac{\gamma}{2} \psi(\omega) \) can be chosen
in different norms, for example:
\(\frac{\gamma}{2} \psi(\omega) = \frac{\gamma}{2} \| \omega \|_{TV}\), TV means “total variation”.
\( \frac{\gamma}{2} \psi(\omega) = \frac{\gamma }{2} \| \omega \|_{BV}\), BV means “bounded variation”, a real-valued function whose TV is bounded (finite).
where terms \(\varphi(\omega), \psi(\omega)\) are considered in \(L_2\) norm which is the classical Banach space.
In (56) \(\omega_{0}\) is a good first
approximation for the exact weight function \(\omega^{\ast }\), which is
called also the first guess or the first approximation. For discussion about how the first guess in the functional (56) should be chosen we refer to [15,16,24].
In this section we will discuss following rules for choosing regularization parameter in (56):
A-priori rule (Tikhonov’s regularization)
– For \(\| t – t^*\| \leq \delta\) a priori rule requires (see details in [15]):
\begin{equation*}
\lim_{\delta \rightarrow 0} \gamma(\delta) \to 0, ~ \lim_{\delta \rightarrow 0} \frac{\delta^2}{\gamma(\delta)} \to 0.
\end{equation*}
A-priori rule and Morozov’s discrepancy are most popular methods for the case when there
exists estimate of the noise level \(\delta\) in data \(t\). Otherwise it is
recommended to use balancing principle or other a-posteriori rules presented in [15,16,17,18,19,23].
5.1. The Tikhonov’s regularization
The goal of regularization is
to construct sequences \(\left\{ \gamma\left( \delta _{k}\right) \right\}
,\left\{ \omega_{\gamma \left( \delta _{k}\right) }\right\} \) in a stable way so that
\begin{equation*}
\lim_{k\rightarrow \infty }\left\Vert \omega_{\gamma \left( \delta _{k}\right)
}- \omega^{\ast }\right\Vert _{B_{1}}=0,
\end{equation*}
where a sequence \(\left\{ \delta _{k}\right\} _{k=1}^{\infty }\)
is such that
Then (65) implies that the sequence \(\left\{ \omega_{\gamma \left( \delta
_{k}\right) }\right\} \subset G\subseteq Q\) is bounded in the norm of the
space \(Q.\) Since \(Q\) is compactly embedded in \(B_{1},\) then there exists a
sub-sequence of the sequence \(\left\{ \omega_{\gamma \left( \delta _{k}\right)
}\right\} \) which converges in the norm of the space \(B_{1}.\)
for some constants \(1 \leq c_{m,1} \leq c_{m,2}\).
The main feature of the principle is that the computed weight function
\(\omega_{\gamma(\delta)}\) can’t be more accurate than the residual
\(\| y(\omega_{\gamma(\delta)}) – t \|\).
The main idea of the principle is to compute discrepancy \(\bar{\varphi}(\gamma)\) using the value function \(F(\gamma)\) and then approximate \(F(\gamma)\) via model functions.
If \( \bar{\psi}(\gamma) \in C(\gamma)\) then the discrepancy equation
(69)
can be rewritten as
The goal is to solve (75) for \(\gamma\).
Main methods for solution of (75) are the model function approach and a quasi-Newton method presented in details in [17].
5.3. Balancing principle
The balancing principle (or Lepskii, see [26,27])
finds \(\gamma > 0\) such that following expression is fulfilled
\begin{equation}
\label{balancing1}
\bar{\varphi}(\gamma) = C \gamma \bar{\psi}(\gamma),
\end{equation}
(76)
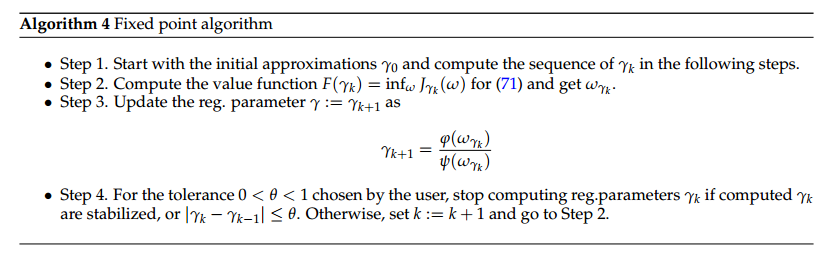
where \(C = a_0/a_1\) is determined by the statistical a priori knowledge from shape parameters in Gamma distributions [17]. When \(\gamma=1\) the method is called zero crossing method, see details in [28].
In [17] for computing \(\gamma\) is proposed the fixed point algorithm 4. Convergence of this algorithm is also analyzed in [17].
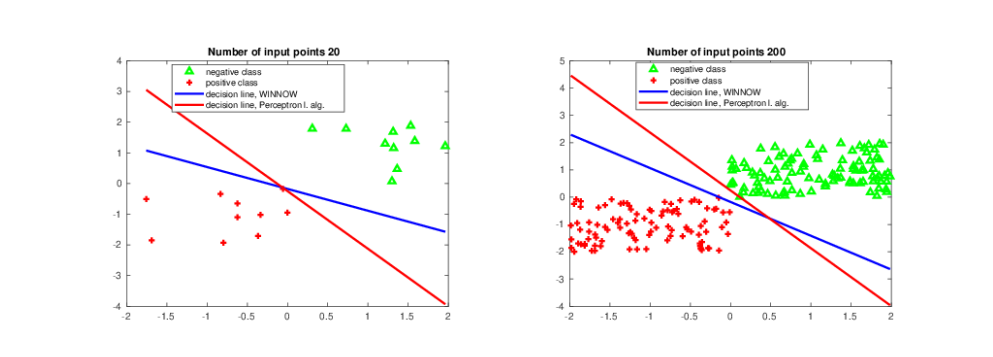
Figure 5. Perceptron learning (red line) and WINNOW (blue line) algorithms for separation of two classes.
6. Numerical results
In this section are presented several examples which show performance
and effectiveness of least squares, perceptron and WINNOW algorithms
for classification. We note that all classification algorithms
considered here doesn’t include regularization.
6.1. Test 1
In this test the goal is to compute decision boundaries for two linearly
separated classes using least squares classification. Points in these classes are generated randomly
by
the linear function \(y = 1.2 – 0.5x\)
on different input intervals for \(x\). Then the random noise \(\delta\) is added to the data \(y(x)\) as
where \(\alpha \in (1, 1)\) is randomly distributed number and \(\delta
\in [0, 1]\) is the noise level.
Then obtained points are classified such that the target function for classification is defined as
Figures 1 present
classification performed via least squares minimization \(\min_\omega \| A\omega
-y \|_2^2\) for the linear model function (23) with target
values \(t\) given by (78) and elements of the design matrix
\(A\) given by (25).
Using these figures we observe that the least squares can be used
successfully for classification when it is known that classes are linearly
separated.
6.2. Test 2
Here we present examples of performance of the perceptron learning
algorithm for classification of two linearly separated classes. Data
for analysis in these examples are generated similarly as in the Test
1. Figures 3 present classification of two classes
in the perceptron algorithm with three
weights. Figures 4 show classification of two classes using
the second order polynomial function 46 in the
perceptron algorithm with six weights. We note that the red and blue
lines presented in Figures 4 are classification boundaries computed via
(51). Figures 5 present comparison of linear
perceptron and WINNOW algorithms for separation of two classes.
Again, all these figures show that perceptron and WINNOW algorithms
can be successfully used for separation of linearly separated classes.
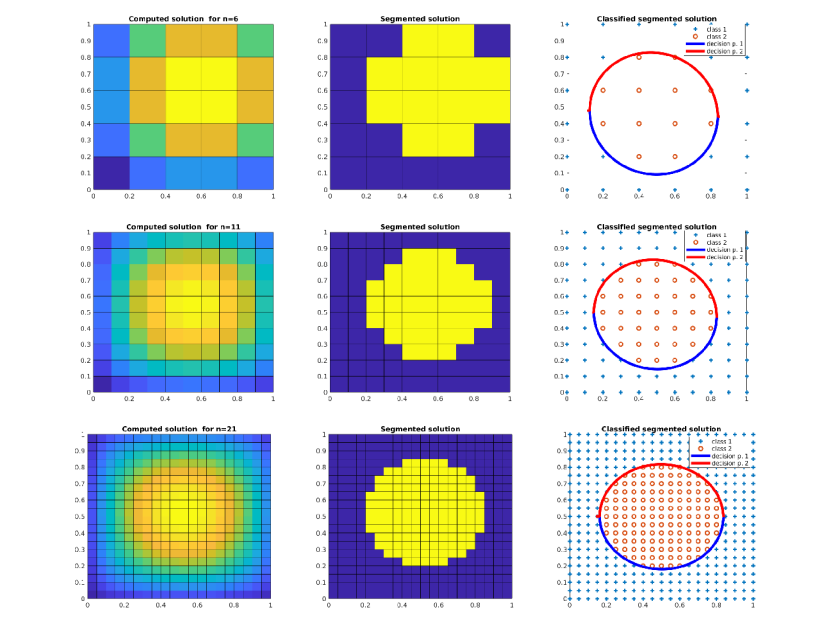
Figure 6. Classification of the computed solution for Poisson’s equation (see example 8.1.3 of [20]) on different meshes using perceptron learning algorithm.
6.3. Test 3
This test shows performance of using the second order polynomial
function (46) in the perceptron algorithm for classification of the
segmented solution. The classification problem in this example is formulated as
follows:
Given the computed solution of the Poisson’s equation
\(\triangle u = f\) with homogeneous boundary conditions \(u=0\) on the
unit square, classify the discrete solution \(u_h\) into two classes
such that the target function for classification is defined as (see middle figures of Figure 6:
Use the second order polynomial function (46) in the
perceptron algorithm to compute decision boundaries.
Details about setup and numerical method to compute solution of
Poisson’s equation are presented in the example 8.1.3 of [20].
Figure 6 presents classification of the computed solution
for Poisson’s equation on different meshes using second order
polynomial in classification algorithm. The computed solution \(u_h\)
of the Poisson’s equation on different meshes is presented on the left
figures of Figure 6. The middle figures show segmentation of
the obtained solution satisfying (79). The right figures
of Figure 6 show results of applying the second order
polynomial function (46) in the perceptron algorithm
for classification of the computed solution \(u_h\) with target function
(79). We observe that in this particular example computed
decision lines correctly separate two classes even if these classes
are not linearly separable.
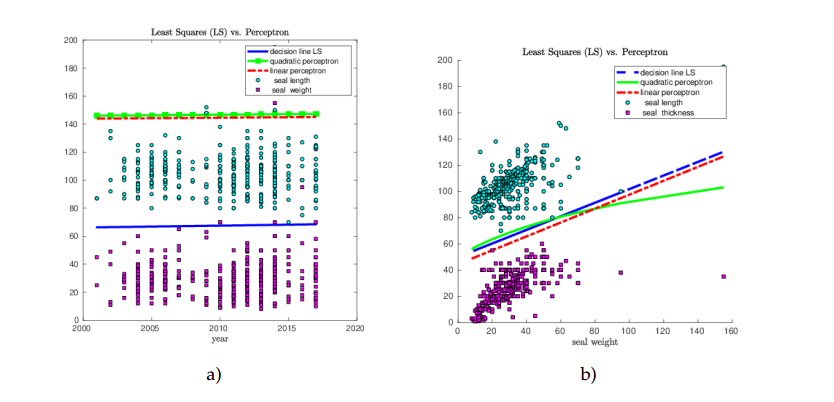
6.4. Test 4
In this test we show performance of linear least squares together with
linear and quadratic perceptron algorithms for classification of
experimental data sets: database of grey seals [13] and Iris
data set [12]. Matlab code to run these simulations is available for download from the link provided in [13].
Figure 7-a) shows classification of
seal length and seal weight depending on the year. Figure
7-b) shows classification of seal length and seal thickness
depending on the seal weight. We observe that classes on Figure
7-a) are not linearly separable and the best algorithm which
separates both classes well, is the least squares. In this example,
the linear and quadratic perceptron have not classified data correctly
and actually, these algorithms have not converged and stopped when the
maximal number of iterations (\(10^8\)) was reached.
As soon as classes become linearly separated, all algorithms show good performance and computes almost the same separation lines, see Figure 7-b).
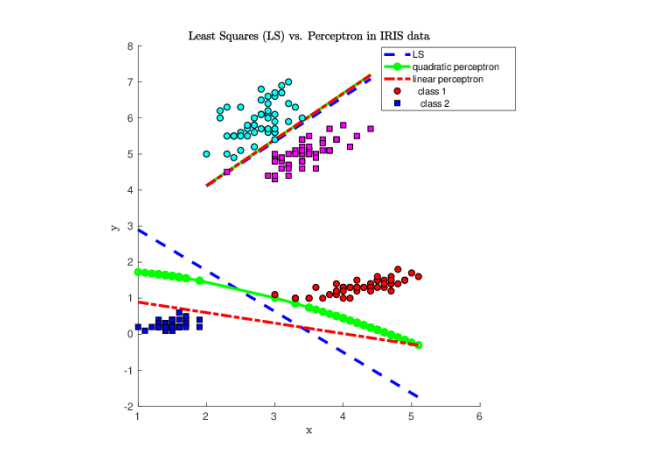
The same conclusion is obtained from separation of Iris data set [12]. Figures 8 show decision lines computed by
least squares, linear and quadratic perceptron algorithms. Since all
classes of Iris data set are linearly separable, all classification algorithms
separate data correctly.
Figure 7. Least squares (LS) and Perceptron learning algorithm for separation of two classes using Grey Seal database [13].Figure 8. Least squares (LS) and Perceptron learning algorithm in classification of Iris dataset [12].
7. Conclusion
We have presented regularized and non-regularized perceptron learning
and least squares algorithms for classification problems as well as
discussed main a-priori and a-posteriori Tikhonov’s regularization
rules for choosing the regularization parameter.
The Fréchet derivatives for
least squares and perceptron algorithms are also rigorously
derived.
The future work can be related to computation of miss-classification
rates which can be done similarly with works [2,29], as
well as to study of classification problem using regularized linear
regression, perceptron learning and WINNOW algorithms. Other
classification algorithms such that regularized SVM and kernel methods
can be also analyzed. Testing of all algorithms on different benchmarks
as well as extension to multiclass case should be also investigated.
Acknowledgments
The research is supported by the Swedish Research Council grant VR 2018-03661.
Conflict of Interests
The author declares no conflict of interest.
References
Bishop, C. M. (2006). Pattern recognition and machine learning. Springer.[Google Scholor]
Hand, D. J., Mannila, H., & Smyth, P. (2001). Principles of data mining (adaptive computation and machine learning). MIT Press.[Google Scholor]
Kotsiantis, S. B., Zaharakis, I., & Pintelas, P. (2007). Supervised machine learning: A review of classification techniques. Emerging Artificial Intelligence Applications in Computer Engineering, 160(1), 3-24.[Google Scholor]
Kubat, M. (2017). An introduction to machine learning. Springer International Publishing AG.[Google Scholor]
Goodfellow, I., Bengio, Y., & Courville, A. (2016). Deep learning. MIT press.[Google Scholor]
Tsai, J. T., Chou, J. H., & Liu, T. K. (2006). Tuning the structure and parameters of a neural network by using hybrid Taguchi-genetic algorithm. IEEE Transactions on Neural Networks, 17(1), 69-80.[Google Scholor]
Lin, S. W., Ying, K. C., Chen, S. C., & Lee, Z. J. (2008). Particle swarm optimization for parameter determination and feature selection of support vector machines. Expert Systems with Applications, 35(4), 1817-1824.[Google Scholor]
Meissner, M., Schmuker, M., & Schneider, G. (2006). Optimized Particle Swarm Optimization (OPSO) and its application to artificial neural network training. BMC Bioinformatics, 7(1), 125.[Google Scholor]
Bartz-Beielstein, T., Chiarandini, M., Paquete, L., & Preuss, M. (Eds.). (2010). Experimental methods for the analysis of optimization algorithms (pp. 311-336). Berlin: Springer.[Google Scholor]
Bergstra, J., Yamins, D., & Cox, D. D. (2013, June). Hyperopt: A python library for optimizing the hyperparameters of machine learning algorithms. In Proceedings of the 12th Python in science conference (Vol. 13, p. 20). Citeseer.[Google Scholor]
Snoek, J., Larochelle, H., & Adams, R. P. (2012). Practical bayesian optimization of machine learning algorithms. In Advances in neural information processing systems (pp. 2951-2959).[Google Scholor]
Classification of grey seals: Matlab code and database. Retrieved from [Google Scholor]
Persson, C. (2016). Iteratively regularized finite element method for conductivity reconstruction in a waveguide (Master’s thesis). Chalmers University of Technology.[Google Scholor]
Bakushinsky, A. B., & Kokurin, M. Y. (2005). Iterative methods for approximate solution of inverse problems (Vol. 577). Springer Science & Business Media.[Google Scholor]
Beilina, L., & Klibanov, M. V. (2012). Approximate global convergence and adaptivity for coefficient inverse problems. Springer Science & Business Media.[Google Scholor]
Ito, K., & Jin, B. (2015). Inverse problems: Tikhonov theory and algorithms. Series on Applied Mathematics, World Scientific.[Google Scholor]
Kaltenbacher, B., Neubauer, A., & Scherzer, O. (2008). Iterative regularization methods for nonlinear ill-posed problems (Vol. 6). Walter de Gruyter.[Google Scholor]
Tikhonov, A. N., Goncharsky, A. V., Stepanov, V. V., & Yagola, A. G. (2013). Numerical methods for the solution of ill-posed problems (Vol. 328). Springer Science & Business Media.[Google Scholor]
Beilina, L., Karchevskii, E., & Karchevskii, M. (2017). Numerical linear algebra: Theory and applications.Springer.[Google Scholor]
Beilina, L., Thành, N. T., Klibanov, M. V., & Malmberg, J. B. (2014). Reconstruction of shapes and refractive indices from backscattering experimental data using the adaptivity. Inverse Problems, 30(10), 105007.[Google Scholor]
Zhang, T. (2001). Regularized winnow methods. In Advances in Neural Information Processing Systems (pp. 703-709).[Google Scholor]
Tikhonov, A. N., & Arsenin, V. Y. (1977). Solutions of ill-posed problems. New York, 1-30.[Google Scholor]
Klibanov, M. V., Bakushinsky, A. B., & Beilina, L. (2011). Why a minimizer of the Tikhonov functional is closer to the exact solution than the first guess. Journal of Inverse and Ill-Posed Problems, 19(1), 83-105.[Google Scholor]
Morozov, V. A. (1966). On the solution of functional equations by the method of regularization. In Doklady Akademii Nauk (Vol. 167, No. 3, pp. 510-512). Russian Academy of Sciences.[Google Scholor]
Lazarov, R. D., Lu, S., & Pereverzev, S. V. (2007). On the balancing principle for some problems of numerical analysis. Numerische Mathematik, 106(4), 659-689.[Google Scholor]
Mathé, P. (2006). The Lepskii principle revisited. Inverse problems, 22(3), L11-L15.[Google Scholor]
Johnston, P. R., & Gulrajani, R. M. (1997). A new method for regularization parameter determination in the inverse problem of electrocardiography. IEEE Transactions on Biomedical Engineering, 44(1), 19-39.[Google Scholor]
Thomas, P. (2015, November). Perceptron learning for classification problems: Impact of cost-sensitivity and outliers robustness. In 2015 7th International Joint Conference on Computational Intelligence (IJCCI) (Vol. 3, pp. 106-113). IEEE.
[Google Scholor]