In literature, there are many methods for solving nonlinear partial differential equations. In this paper, we develop a new method by combining Adomian decomposition method and Shehu transform method for solving nonlinear partial differential equations. This method can be named as Shehu transform decomposition method (STDM). Some examples are solved to show that the STDM is easy to apply.
The use of integral transforms (Laplace, Sumudu, Natural, Elzaki, Aboodh, Shehu and other transforms)
in solving linear differential equations as well as integral equations has developed significantly as a result of the
advantages of these transformations. Through these transforms, many problems
of engineering and sciences have been solved. However, it was found that
these transforms remain limited in solving equations that contain a
nonlinear part.
To take advantage of these transformations and to use them to solve
nonlinear differential equations, researchers in the field of mathematics
were guided to the idea of their composition with some methods such as:
Adomian decomposition method (ADM) [1, 2, 3, 4], homotopy
analysis method [5, 6, 7, 8], variational iteration method
(VIM) [9, 10, 11,12], homotopy perturbation method (HPM) [13, 14, 15,16]
and DJ iteration method [17, 18, 19, 20].
The objective of the present study is to combine two powerful methods,
Adomian decomposition method and Shehu transform method to get a better
method to solve nonlinear partial differential equations. The modified
method is called Shehu transform decomposition method (STDM). We apply
our modified method to solve some examples of nonlinear partial
differential equations.
2. Basics of Shehu transform
In this section we define Shehu transform and gave its important properties [21].
Definition
The Shehu transform of the function \(v(t)\) of exponential order is defined
over the set of functions:
where \(s\) and \(u\) are the Shehu transform variables, and \(\alpha \) is a real
constant and the integral in Equation (4) is taken along \(s=\alpha \) in
the complex plane \(s=x+iy.\)
Theorem 2.
(The sufficient condition for the existence of Shehu transform [21]. If the
function \(v(t)\) is piecewise continues in every finite interval \(0\leqslant
t\leqslant \beta \) and of exponential order \(\alpha \) for \(t>\beta \). Then
its Shehu transform \(V(s;u)\) exists.
Theorem 3.
(Derivative of Shehu transform [21]. If the function \(v^{\left( n\right) }(t)\)
is the \(n\)th derivative of the function \(v(t)\in A\) with respect to \(
^{\prime }t^{\prime }\) then its Shehu transform is defined as:
where \(\frac{\partial ^{m}U(x,t)}{\partial t^{m}}\) is the partial derivative
of the function \(U(x,t)\) of order \(m\) \((m=1,2,3)\), \(R\) is the linear
differential operator, \(N\) represents the general nonlinear differential
operator, and \(g(x,t)\) is the source term.
Applying the Shehu transform (denoted in this paper by \(\hat{S}\)) on both
sides of Equation (13), we get
where \(G(x,t)\), represents the term arising from the source term and the
prescribed initial conditions.
The second step in Shehu transform decomposition method, is that we
represent the solution as an infinite series given below
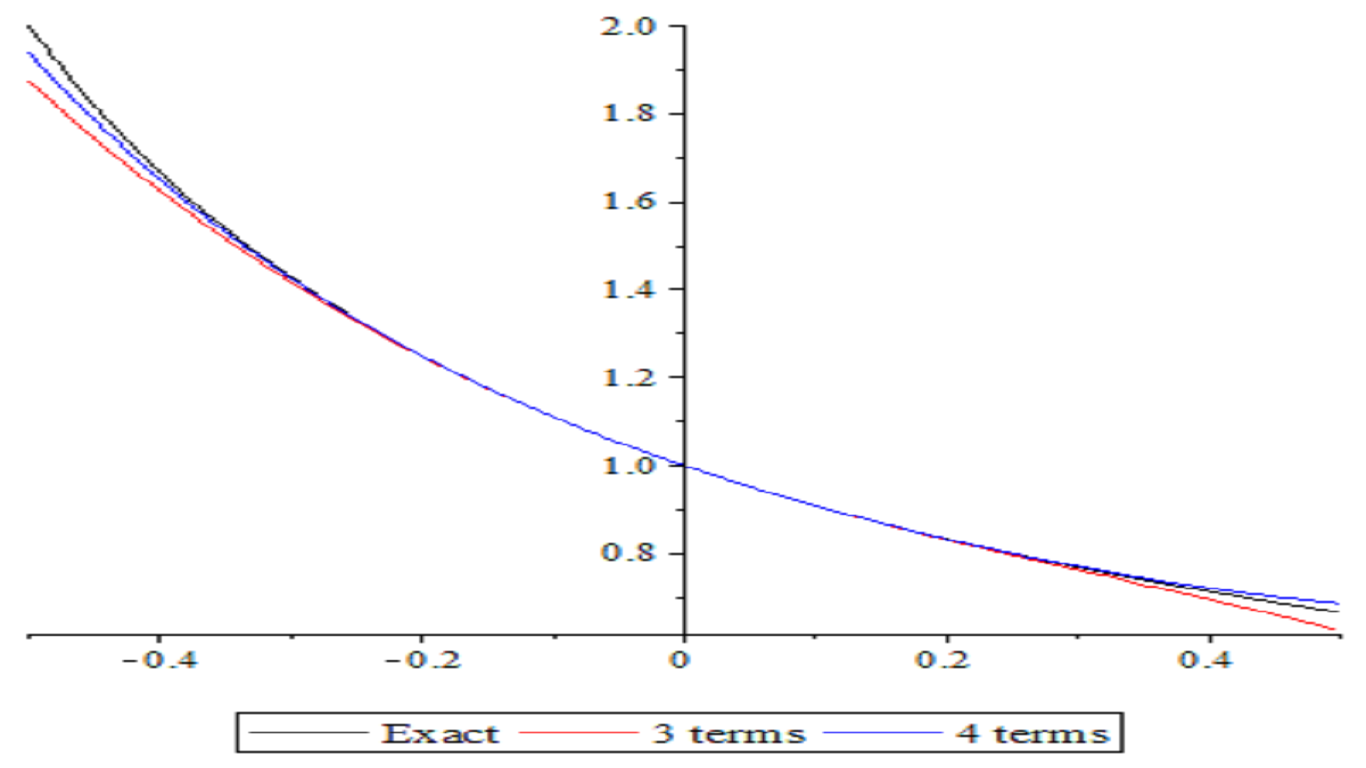
which is an exact solution to the KdV equation as presented in [25].
The graphs of exact solution and approximate solutions of Equation (25) for 3 terms and 4 terms is given in Figure 1.
Figure 1. The graphs of exact solution and approximate solutions of Equation (25) for 3 terms and 4 terms.
Example 2.
Consider the nonlinear gas dynamics equation:
This result is the same as that obtained in [26] using
homotopy analysis method. In Figure 2, \((a)\) represents the graph of exact solution, \((b)\) represents the graph of approximate solutions in 5 terms and \((c)\) represents the graph of approximate solutions in 4 terms.
Figure 2. \((a)\) Represents the graph of exact solution, \((b)\) represents the graph of approximate solutions in 5 terms, \((c)\) represents the graph of approximate solutions in 4 terms.
Example 3.
Consider the nonlinear wave-like equation with
variable coefficients:
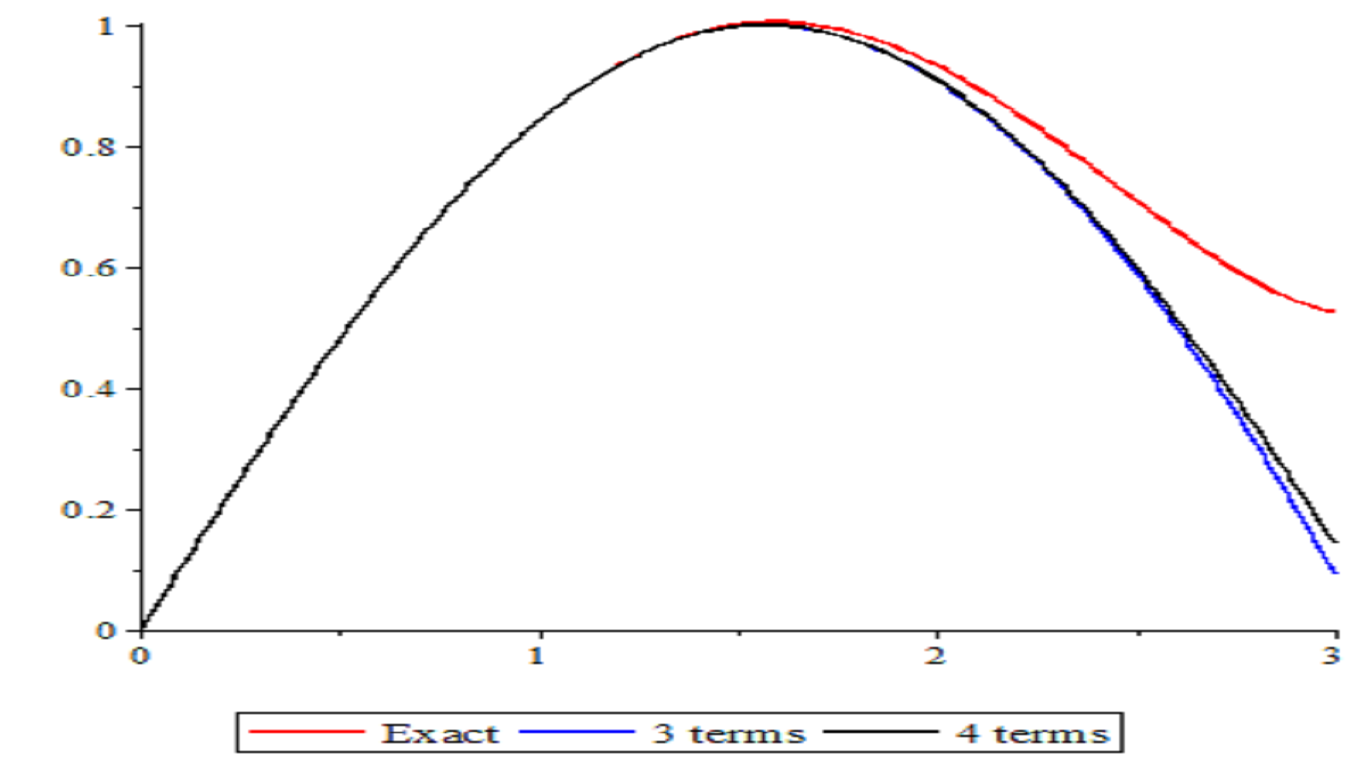
This result represents the exact solution of the Equation (45) as
presented in [27]
The graphs of exact solution and approximate solutions of Equation (45) for 3 terms and 4 terms are shown in Figure 3.
Figure 3. The graphs of exact solution and approximate solutions of Equation (45) for 3 terms and 4 terms.
4. Conclusion
The coupling of Adomian decomposition method (ADM) and Shehu transform
method proved very effective to solve nonlinear partial differential
equations. We can say that this method is easy to implement and is very effective,
as it allows us to know the exact solution after calculate the first three
terms only. As a result, the conclusion that comes through this work is that
(STDM) can be applied to other nonlinear partial differential equations of
higher order, due to the efficiency and flexibility.
Author Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the
final manuscript.
Competing Interests
The author(s) do not have any competing interests in the manuscript.
References
Adomian, G., & Rach, R. (1990). Equality of partial solutions in the decomposition method for linear or nonlinear partial differential equations. Computers & Mathematics with Applications, 19(12), 9-12. [Google Scholor]
Adomian, G. (2013). Solving frontier problems of physics: the decomposition method (Vol. 60). Springer Science & Business Media. [Google Scholor]
Adomian, G. (1994). Solution of physical problems by decomposition. Computers & Mathematics with Applications, 27(9-10), 145-154.[Google Scholor]
Adomian, G. (1998). Solutions of nonlinear PDE. Applied Mathematics Letters, 11(3), 121-123. [Google Scholor]
Liao, S. J. (1992). The proposed homotopy analysis technique for the solution of nonlinear problems (Doctoral dissertation, Ph. D. Thesis, Shanghai Jiao Tong University). [Google Scholor]
Raton, B. (2003). Beyond Perturbation: Introduction to Homotopy Analysis Method. Chapman and Hall/CRC Press, Boca Raton. [Google Scholor]
Liao, S. (2004). On the homotopy analysis method for nonlinear problems. Applied Mathematics and Computation, 147(2), 499-513. [Google Scholor]
Liao, S. (2009). Notes on the homotopy analysis method: some definitions and theorems. Communications in Nonlinear Science and Numerical Simulation, 14(4), 983-997. [Google Scholor]
He, J. (1997). A new approach to nonlinear partial differential equations. Communications in Nonlinear Science and Numerical Simulation, 2(4), 230-235. [Google Scholor]
He, J. H. (1998). Approximate analytical solution for seepage flow with fractional derivatives in porous media. Computer Methods in Applied Mechanics and Engineering, 167(1-2), 57-68. [Google Scholor]
He, J. H. (1998). A variational iteration approach to nonlinear problems and its applications. Mech. Appl, 20(1), 30-31. [Google Scholor]
He, J. H., & Wu, X. H. (2007). Variational iteration method: new development and applications. Computers & Mathematics with Applications, 54(7-8), 881-894. [Google Scholor]
He, J. H. (1999). Homotopy perturbation technique. Computer methods in applied mechanics and engineering, 178(3-4), 257-262. [Google Scholor]
He, J. H. (2005). Application of homotopy perturbation method to nonlinear wave equations. Chaos, Solitons & Fractals, 26(3), 695-700. [Google Scholor]
He, J. H. (2000). A coupling method of homotopy technique and perturbation to Volterra’s integro-differential equation. International Journal of Non-Linear Mechanics, 35(1), 37-43. [Google Scholor]
He, J. H. (2000). A new perturbation technique which is also valid for large parameters. Journal of Sound and Vibration, 5(229), 1257-1263.[Google Scholor]
Daftardar-Gejji, V., & Jafari, H. (2006). An iterative method for solving nonlinear functional equations. Journal of Mathematical Analysis and Applications, 316(2), 753-763. [Google Scholor]
Hemeda, A. A. (2012). New iterative method: application to nth-order integro-differential equations. In International Mathematical Forum (Vol. 7, No. 47, pp. 2317-2332). [Google Scholor]
AL-Jawary, M. A. (2014). A reliable iterative method for Cauchy problems. Mathematical Theory and Modeling, 4, 148-153. [Google Scholor]
Patade, J., & Bhalekar, S. (2015). Approximate analytical solutions of Newell-Whitehead-Segel equation using a new iterative method. World Journal of Modelling and Simulation, 11(2), 94-103. [Google Scholor]
Maitama, S., & Zhao, W. (2019). New integral transform: Shehu transform a generalization of Sumudu and Laplace transform for solving differential equations. International Journal of Nonlinear Analysis and Applications , 17(2), 167-19. [Google Scholor]
Zhu, Y., Chang, Q., & Wu, S. (2005). A new algorithm for calculating Adomian polynomials. Applied Mathematics and Computation, 169(1), 402-416. [Google Scholor]
Hosseini, M. M., & Nasabzadeh, H. (2006). On the convergence of Adomian decomposition method. Applied mathematics and computation, 182(1), 536-543. [Google Scholor]
Wazwaz, A. M. (2007). The variational iteration method for rational solutions for KdV, K(2,2), Burgers, and cubic Boussinesq equations. Journal of Computational and Applied Mathematics, 207(1), 18-23. [Google Scholor]
Ziane, D., & Cherif, M. H. (2015). Resolution of nonlinear partial differential equations by elzaki transform decomposition method. J. Appr. Theor. App. Math, 5, 17-30. [Google Scholor]
Jafari, H., Chun, C., Seifi, S., & Saeidy, M. (2009). Analytical solution for nonlinear gas dynamic equation by homotopy analysis method. Applications and Applied mathematics, 4(1), 149-154.[Google Scholor]
Gupta, V., & Gupta, S. (2013). Homotopy perturbation transform method for solving nonlinear wave-like equations of variable coefficients. Journal of Information and Computing Science, 8(3), 163-172. [Google Scholor]