Theorem 1. Let \(\left\vert c_{1}c_{3}-c_{4}\right\vert +c_{4}\left\vert 1-c_{1}\right\vert < \left\vert c_{3}-c_{4}\right\vert .\) Then, the fixed point of Equation (1) is locally asymptotically stable.
Proof. It can be simply observed from Theorem A of [16] that the equilibrium point of Equation (1) is locally asymptotically stable if \begin{equation*} \left\vert p_{1}\right\vert +\left\vert p_{2}\right\vert < 1. \end{equation*} This gives us \begin{equation*} \left\vert -\Bigg(c_{1}-\frac{c_{4}(1-c_{1})}{c_{3}-c_{4}}\Bigg)\right\vert +\left\vert -\frac{c_{4}(1-c_{1})}{c_{3}-c_{4}}\right\vert < 1, \end{equation*} which can be written on the following form \begin{equation*} \left\vert c_{1}(c_{3}-c_{4})-c_{4}(1-c_{1})\right\vert +c_{4}\left\vert 1-c_{1}\right\vert < \left\vert (c_{3}-c_{4})\right\vert . \end{equation*} Hence, \begin{equation*} \left\vert c_{1}c_{3}-c_{4}\right\vert +c_{4}\left\vert 1-c_{1}\right\vert < \left\vert c_{3}-c_{4}\right\vert . \end{equation*} This complete the proof.
Theorem 2. \label{first glo. thm} Let \(c_{1}c_{4}.\)
Proof. Let \(a,\ b \in \mathbb{R}\) and suppose that \(h:\left[ a,b\right] ^{2}\longrightarrow \left[ a,b\right] \) is a function defined by Equation (2). We assume that \(c_{1}< \frac{c_{2}c_{4}s}{(c_{3}r-c_{4}s)^{2}},\) then the function \(h\) is decreasing in \(r\) and increasing in \(s.\) Now, we suppose that \((\phi, \psi)\) is a solution to the system given by $$\phi=h(\psi,\phi),\ \psi=h(\phi,\psi).$$ Therefore, \begin{align*} \phi &= h(\psi,\phi)=c_{1} \psi +\frac{c_{2} \psi}{c_{3}\psi-c_{4}\phi}, \\ \psi&=h(\phi,\psi)=c_{1}\phi+\frac{c_{2}\phi}{c_{3}\phi-c_{4}\psi}. \end{align*} Clearing the denominators gives
Theorem 3. Let \(c_{1}>\frac{c_{2}c_{4}s}{(c_{3}r-c_{4}s)^{2}},\) then the equilibrium point of Equation (1) is a global attractor if \(c_{3}< c_{4}\) and \(c_{1}< 1.\)
Proof. The proof can be accomplished in a similar way to the previous one. Thus, it is omitted.
Theorem 4. The Equation (1) has no prime period two solutions.
Proof. Assume that the Equation (1) has a prime period two solution given as follows \begin{equation*} \ldots,\ t,\ \tau,\ t,\ \tau,\ \ldots, \end{equation*} with \(t \neq \tau.\) From Equation (1), one can observe that \begin{eqnarray*} t&=&c_{1}t+\frac{c_{2}t}{c_{3}t-c_{4}t},\\ \tau &=& c_{1}\tau+\frac{c_{2}\tau}{c_{3}\tau-c_{4}\tau}. \end{eqnarray*} Hence, \begin{eqnarray*} (1-c_{1})t&=&\frac{c_{2}}{c_{3}-c_{4}},\\ (1-c_{1})\tau &=& \frac{c_{2}}{c_{3}-c_{4}}. \end{eqnarray*} This implies that \(t=\tau,\) which contradicts our assumption.
Theorem 5. Let \(\left \{x_{n}\right\}_{n=-7}^{\infty}\) be a solution of Equation (7) and assume that \(x_{-7}=\alpha,\ x_{-6}=\beta,\ x_{-5}=\gamma,\ x_{-4}=\delta,\ x_{-3}=\epsilon,\ x_{-2}=\zeta,\ x_{-1}=\kappa,\ x_{0}=\omega.\) Then, for \(n=0,1,2,…,\) the solution of Equation (7) is given by the following relations \begin{eqnarray*} x_{8n-7} &=&-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n\right] }{\alpha -\epsilon },\ \ \ x_{8n-6}=-\frac{\left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n\right] }{% \beta -\zeta }, \\ x_{8n-5} &=&-\frac{\left[ \left( n-1\right) \gamma -n\kappa \right] \left[ \gamma -\kappa -n\right] }{\gamma -\kappa },\ \ \ x_{8n-4}=-\frac{\left[ \left( n-1\right) \delta -n\omega \right] \left[ \delta -\omega -n\right] }{% \delta -\omega }, \\ x_{8n-3} &=&-\frac{\left[ n\alpha -\left( n+1\right) \epsilon \right] \left[ \alpha -\epsilon -n\right] }{\alpha -\epsilon },\ \ \ x_{8n-2}=-\frac{\left[ n\beta -\left( n+1\right) \zeta \right] \left[ \beta -\zeta -n\right] }{% \beta -\zeta }, \\ x_{8n-1} &=&-\frac{\left[ n\gamma -\left( n+1\right) \kappa \right] \left[ \gamma -\kappa -n\right] }{\gamma -\kappa },\ \ \ x_{8n}=-\frac{\left[ n\delta -\left( n+1\right) \omega \right] \left[ \delta -\omega -n\right] }{% \delta -\omega }. \end{eqnarray*}
Proof. It can be easily seen that the formulae are true at \(n=0.\) Next, we assume that \(n>0\) and suppose that our solution is correct at \(n-1\) as follows \begin{eqnarray*} x_{8n-15} &=&-\frac{\left[ \left( n-2\right) \alpha -\left( n-1\right) \epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon },\ \ \ x_{8n-14}=-\frac{\left[ \left( n-2\right) \beta -\left( n-1\right) \zeta % \right] \left[ \beta -\zeta -n+1\right] }{\beta -\zeta }, \\ x_{8n-13} &=&-\frac{\left[ \left( n-2\right) \gamma -\left( n-1\right) \kappa \right] \left[ \gamma -\kappa -n+1\right] }{\gamma -\kappa },\ \ \ x_{8n-12}=-\frac{\left[ \left( n-2\right) \delta -\left( n-1\right) \omega % \right] \left[ \delta -\omega -n+1\right] }{\delta -\omega }, \\ x_{8n-11} &=&-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon },\ \ \ x_{8n-10}=-\frac{% \left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n+1% \right] }{\beta -\zeta }, \\ x_{8n-9} &=&-\frac{\left[ \left( n-1\right) \gamma -n\kappa \right] \left[ \gamma -\kappa -n+1\right] }{\gamma -\kappa },\ \ \ x_{8n-8}=-\frac{\left[ \left( n-1\right) \delta -n\omega \right] \left[ \delta -\omega -n+1\right] }{\delta -\omega }. \end{eqnarray*} Now, we prove the first relation. Equation (7) gives \begin{eqnarray*} x_{8n-7} &=&x_{8n-11}+\frac{x_{8n-11}}{x_{8n-11}-x_{8n-15}} \end{eqnarray*} \begin{eqnarray*} &=&-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon }+\frac{-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{% \alpha -\epsilon }}{-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon }+\frac{\left[ \left( n-2\right) \alpha -\left( n-1\right) \epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon }} \\ &=&-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon }-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] }{\epsilon -\alpha } \\ &=&-\left[ \frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n+1\right] }{\alpha -\epsilon }-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] }{\alpha -\epsilon }\right] \\ &=&-\frac{\left[ \left( n-1\right) \alpha -n\epsilon \right] \left[ \alpha -\epsilon -n\right] }{\alpha -\epsilon }. \end{eqnarray*} We now prove the second formula. Again, Equation (7) gives \begin{eqnarray*} x_{8n-6} &=&x_{8n-10}+\frac{x_{8n-10}}{x_{8n-10}-x_{8n-14}} \\ &=&-\frac{\left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n+1\right] }{\beta -\zeta }+\frac{-\frac{\left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n+1\right] }{\beta -\zeta }}{-\frac{% \left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n+1% \right] }{\beta -\zeta }+\frac{\left[ \left( n-2\right) \beta -\left( n-1\right) \zeta \right] \left[ \beta -\zeta -n+1\right] }{\beta -\zeta }} \\ &=&-\left[ \frac{\left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n+1\right] }{\beta -\zeta }-\frac{\left[ \left( n-1\right) \beta -n\zeta \right] }{\beta -\zeta }\right] \\ &=&-\frac{\left[ \left( n-1\right) \beta -n\zeta \right] \left[ \beta -\zeta -n\right] }{\beta -\zeta }. \end{eqnarray*} The proofs of the remaining relations can be achieved in a similar way. Thus, the remaining proofs are omitted.
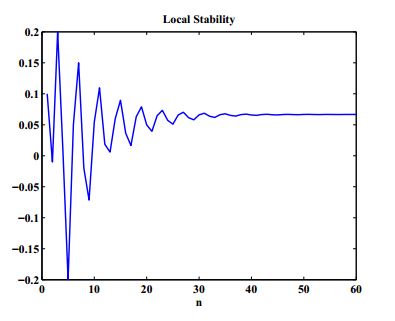
Example 1. In this example, we confirm the local stability of the equilibrium point under the values \(c_{1}=0.5,\ c_{2}=0.3,\ c_{3}=10,\ c_{4}=1,\ x_{-7}=-0.02,\ x_{-6}=0.15,\ x_{-5}=0.05,\ x_{-4}=-0.2,\ x_{-3}=0.01,\ x_{-2}=0.2,\ x_{-1}=-0.01,\ x_{0}=0.1. \) See Figure 1.
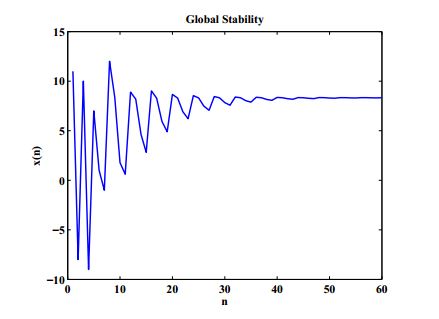
Example 2. Figure 2 shows the global stability of the fixed point when we let \(c_{1}=0.5,\ c_{2}=10,\ c_{3}=3,\ c_{4}=0.6,\ x_{-7}=12,\ x_{-6}=-1,\ x_{-5}=1,\ x_{-4}=7,\ x_{-3}=-9,\ x_{-2}=10,\ x_{-1}=-8,\ x_{0}=11. \)
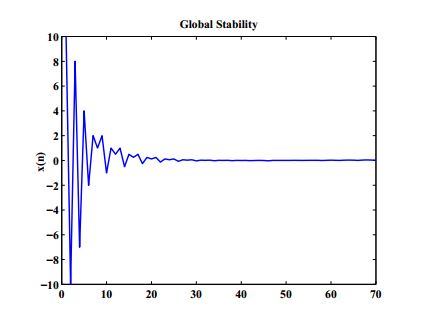
Example 3. In Figure 3, we plot the global stability under the conditions given in Theorem 3. Here, we consider the values \(c_{1}=0.5,\ c_{2}=0.025,\ c_{3}=5,\ c_{4}=6,\ x_{-7}=1,\ x_{-6}=2,\ x_{-5}=-2,\ x_{-4}=4,\ x_{-3}=-7,\ x_{-2}=8,\ x_{-1}=-10,\ x_{0}=10. \)
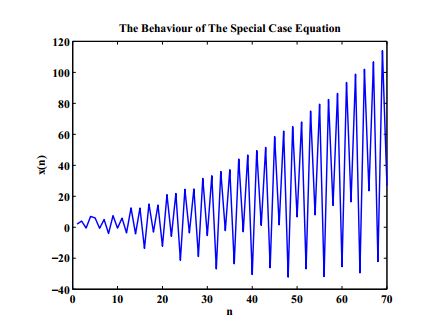
Example 4. The behaviour of the solution of Equation (7) is plotted in Figure 4 according to the following values: \(c_{1}=0.5,\ c_{2}=0.025,\ c_{3}=5,\ c_{4}=6,\ x_{-7}=1,\ x_{-6}=2,\ x_{-5}=-2,\ x_{-4}=4,\ x_{-3}=-7,\ x_{-2}=8,\ x_{-1}=-10,\ x_{0}=10.\)