In this work, we study the small oscillations of a system formed by an elastic container with negligible density and a heavy barotropic gas (or a compressible fluid) filling the container. By means of an auxiliary problem, that requires a careful mathematical study, we deduce the problem to a problem for a gas only. From its variational formulation, we prove that is a classical vibration problem.
Keywords: Barotropic gas, small oscillations, mixed boundary conditions, vibration problem, variational and spectral methods.
1. Introduction
The problem of the small oscillations of a heavy homogeneous inviscid liquid in an open rigid container has been the subject, from the pioneering work by Moiseyev [1], of numerous papers, that are analyzed in the books [2, 3, 4].
The same problem in the case of an elastic container is studied in the book [5]. Recently, we have solved the problem of the small oscillations of an heterogeneous liquid in an elastic container [6].
In this work, we study the problem of the small oscillations of a system formed by a heavy barotropic gas (or a compressible fluid) and an elastic body with negligible density, circumitance that can happen in the transport of fluids. At first, we establish the equations of motion of the system body-gas and the boundaries conditions. Afterwards, introducing an auxiliary problem, that requires a careful mathematical discussion, and that is the problem of the motion of the body when the motion of the gas is known, we show a linear operator depending on the elasticity of the body, that permits us to reduce the problem to a problem for the gas only. From the variational equation of this last problem, we prove that it is a classical vibration problem.
2. Position of the problem
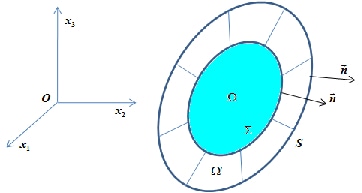
We consider, in the field of the gravity, an elastic body with negligible density, that occupies in the equilibrium position a domain \(\Omega’\) bounded by a fixed external surface \(S\) and an internal surface \(\Sigma\). The interior \(\Omega\) of this surface is completely filled by a heavy barotropic gas.
Figure 1. Model of the system.
We choose orthogonal axes \(Ox_1x_2x_3\), \(Ox_3\) vertical directed upwards and we denote by \(\overrightarrow{n}\) the unit vector normal to the surfaces. We are going to study the small oscillations
of the system elastic body-gas about its equilibrium position, in the framework of the linear theory.
3. The equations of the problem
3.1. The equations of the elastic body with negligible density
Let \(\vec{\hat{u}}'(x_i)\) the (small) displacement of the particle of the body from the natural state to the equilibrium position.
The equilibrium equations are:
where \(p_{0}\) is the pressure of the gas in the equilibrium position and where we have set:
\[
\sigma’_{ij}(\vec{\hat{u}}’)=\lambda’ \delta_{ij} \text{div}\vec{\hat{u}}’+2\mu’ \epsilon’_{ij}(\vec{\hat{u}}’)
\qquad ;\qquad
\epsilon’_{ij}(\vec{\hat{u}}’)=\frac{1}{2}\left( \frac{\partial \hat{u}’_{i}}{\partial x_{j}}+\frac{\partial \hat{u}’_{j}}{\partial x_{i}} \right)
\;\;
\]
\(\lambda’\) and \(\mu’\) are the Lame’s coefficients;
\(\sigma’_{ij}(\vec{\hat{u}}’)\) and
\(\epsilon’_{ij}(\vec{\hat{u}}’)\) are the components of the stress tensor and the strain tensor respectively.
Now, let \(\vec{u}'(x_i,t)\) the displacement of a particle from its equilibrium position to its position at the instant \(t\). We have
\[
0=\frac{\partial \sigma’_{ij}(\vec{\hat{u}}’+\vec{u}’)}{\partial x_{j}}
\qquad \text{in} \qquad \Omega’
\]
and consequently
Let \(\vec{u}\left( x_i,t\right)\) the displacement of a particle of the gas from its equilibrium position to its position at the instant \(t\); we must have the kinematic condition:
where \(\mathscr{P}\) is a given smooth increasing function. If \(\rho_0\) is the density in the equilibrium postion, we have
\[
p_0=\mathscr{P}\left( \rho_0 \right)
\]
and the equilibrium equation
It is a differential equation of the first order that must be verified by \(\rho_0 \left( x_3 \right)\).
The equation of the motion of the gas are, besides (6):
Since, we study the small motions of the gas about its equilibrium position, we set
\begin{equation*}
\begin{aligned}
&\qquad \rho^{\ast}=\rho_{0}(x_3)+\tilde{\rho}(x_i,t)+\cdots,\\[.1cm]
& \qquad {P}=p_{0}(x_3)+p(x_i,t)+\cdots \;.
\end{aligned}
\end{equation*}
The \(\tilde{ \rho}\) and the dynamic pressure \(p\) are of the first order with respect to the amplitude of the oscillations, the dots represent terms of order greater than one. We have, at the first order
\begin{equation*}
\frac{\partial \tilde{\rho}}{\partial t}+\text{div}(\rho_0 (x_3)\dot{\vec{u}})=0 \;;
\end{equation*}
integrating between the datum of the equilibrium position and the instant \(t\), we have
The Euler’s Equation can be written
\begin{eqnarray*}
\rho_0\ddot{\vec{u}}+\cdots
& = &
-\overrightarrow{\text{grad}}\left( p_0+p+\cdots\right)-\left( \rho_0-\text{div}\left(\rho_0 \vec{u}\right)+\cdots\right)g\vec{x}_3\\
& = &
\overrightarrow{\text{grad}}\left( c^{2}_{0} \text{div}\left(\rho_0 \vec{u}\right) \right)
+g\text{div}\left(\rho_0 \vec{u}\right)\vec{x}_3
+\cdots \,,\\
\end{eqnarray*}
and, using the equation (10), finally we get
which is the equation that contains \(\vec{u}\) only.
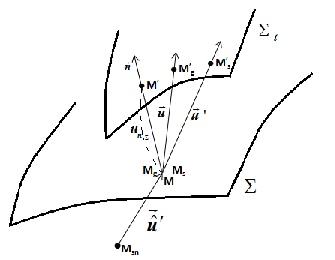
3.3. The dynamic conditions on the surface \(\Sigma_t\)
Figure 2. Configuations of \(\Sigma\) and \(\Sigma_t\).
Let \(M\) a point of \(\Sigma\). We denote by \(M_{g}\), \(M_{s}\) the particles of the gas and of the elastic body that are in \(M\) at the instant \(t=0\). These particles come in \(M’_{g}\), \(M’_{s}\) on \(\Sigma_{t}\) at the instant \(t\):
\[
\overrightarrow{MM’_{g}}=\vec{u}\qquad ;\qquad \overrightarrow{MM’_{s}}=\vec{u}’
\]
In linear theory, we admit that the unit vectors normal to
\( \Sigma_{t}\) in \( M’_{g}\) and \( M’_{s}\) are equipollent to the unit vector \(\vec{n}\) normal in
\(M\) to \(\Sigma\) and that the pressure of the gas \(P\) in \(M’_{g}\) is equal to the pressure of the gas in \(M’\), intersection of \(\Sigma_{t}\) with the normal in \(M\) to \(\Sigma\).
The dynamic conditions on \(\Sigma_{t}\) are
\begin{equation*}
\sigma’_{ij}(\vec{\hat{u}}’+\vec{u}’)n_{j}=-{P}(M’,t)n_{i} \;.
\end{equation*}
Or, using the second condition (2):
\begin{equation*}
\sigma’_{ij}(\vec{u}’)n_{j}=-[{P}(M’,t)-p_{0}(M) ]\cdot n_{i}\qquad \text{on} \;\; \Sigma \;.
\end{equation*}
We have
\[
{P}(M’,t)={P}(M + u_{n|\Sigma} \vec{n},t)=\mathcal{P}(M,t)+\overrightarrow{\text{grad}}{P}(M)\cdot u_{n|\Sigma} \vec{n}+\cdots
\]
Since \(u_{n|\Sigma}\) is of the first order, we can, in linear theory, replace \(\overrightarrow{\text{grad}}{P}(M,t)\) by
\[
\overrightarrow{\text{grad}}p_{0}=- \rho_{0}\,g\vec{x}_{3}\;,
\]
so that
\[
{P}(M’,t)={P}(M,t)-\rho_{0} g \, u_{n|\Sigma}\; n_{3|\Sigma}+\cdots
\]
and finally
\begin{equation}
\label{eq16}
\sigma’_{ij}(\vec{u}’)n_{j}=[-p(M,t)+\rho_{0|_\Sigma} g n_{3|\Sigma}\;u_{n|\Sigma}]n_{i}\qquad \text{on} \;\; \Sigma \;.
\end{equation}
(16)
Let us call \(\overrightarrow{T}_t \left( \vec{u}’ \right)_{|\Sigma}\) the tangential stress and \({T}_n \left( \vec{u}’ \right)_{|\Sigma}\) the normal stress; we have
where \(u_{n|\Sigma}\) is considered as a datum.
It is the problem of the motion of an elastic body when the motion of the gas is known and we seek the solution of this auxiliary problem in the space.
\[
\widehat{\Xi}^1(\Omega’)\overset{\text{def}}{=}\left\{
\vec{u}’ \in {\Xi}^{1}(\Omega’)\overset{\text{def}}{=}\left[ H^1(\Omega’)\right]^3;\;\; \vec{u}’_{|S}=0
\right\} \;.
\]
Then \(u’_{n|\Sigma} \in H^{1/2}(\Sigma)\) and consequently, we suppose that \(u_{n|\Sigma} \in H^{1/2}(\Sigma)\).
Case 2. Let \(\overrightarrow{\Phi}\) an element of \(\widehat{\Xi}^1(\Omega’)\) such that
\(\Phi_{n|\Sigma} =u_{n|\Sigma}\in H^{1/2}(\Sigma) \).
In the following, we will see the construction of such \(\overrightarrow{\Phi}\). We denote by \(V_0\) the subspace of \(\hat{\Xi}^1(\Omega’)\) defined by
\[
V_0=
\left\{
\vec{v}_0 \in \widehat{\Xi}^1(\Omega’)\quad; \quad
v_{0n|\Sigma}=0
\right\}
\]
and we seek the solution \(\vec{u}’\) of the auxiliary problem in the form
\[
\vec{u}’=\overrightarrow{\Phi}+\vec{v}_0\;.
\]
The auxiliary problem (18) becomes a problem for \(\vec{u}_0 \in V_0\):
Let us seek a variational formulation of this problem.
We have, for each \(\vec{v}_0\in V_0\):
\[
– \int_{\Omega’}
\frac{\partial \sigma’_{ij}(\vec{u}_0)}{\partial x_{j}} \cdot \bar{v}_{0i}
\, \mathrm d\Omega’
=
\int_{\Omega’}
\frac{\partial \sigma’_{ij}(\overrightarrow{\Phi})}{\partial x_{j}}
\cdot \bar{v}_{0i}
\, \mathrm d\Omega’
\]
or
\[
\begin{aligned}
&
– \int_{\Omega’}
\left[
\frac{\partial}{\partial x_{j}}[ \sigma’_{ij}(\vec{u}_0) \bar{v}_{0i} ]
– \sigma’_{ij}(\vec{u}_0)\epsilon’_{ij}(\bar{\vec{v}}_0)
\right]
\, \mathrm d\Omega’
\\
&\qquad
=
\int_{\Omega’}
\left[
\frac{\partial}{\partial x_{j}}[ \sigma’_{ij}(\overrightarrow{\Phi}) \bar{v}_{0i} ]
– \sigma’_{ij}(\overrightarrow{\Phi})\epsilon’_{ij}(\bar{\vec{v}}_0)
\right]
\, \mathrm d\Omega’
\;,
\end{aligned}
\]
or, using the Green’s formula and denoting by \(\vec{n}_\text{e}\), the external normal unit vector to \(\partial \Omega’\):
\[
\begin{aligned}
&
-\int_{S}
\sigma’_{ij}(\vec{u}_0) {n}_\text{ej} \bar{v}_{0i} \, \mathrm dS
-\int_{\Sigma}
\sigma’_{ij}(\vec{u}_0) {n}_\text{ej} \bar{v}_{0i} \, \mathrm d\Sigma
+ \int_{\Omega’}
\sigma’_{ij}(\vec{u}_0)\epsilon’_{ij}(\bar{\vec{v}}_0)
\, \mathrm d\Omega’
\\
&\qquad
=
\int_{S}
\sigma’_{ij}(\overrightarrow{\Phi}) {n}_\text{ej} \bar{v}_{0i} \, \mathrm dS
+
\int_{\Sigma}
\sigma’_{ij}(\overrightarrow{\Phi}) {n}_\text{ej} \bar{v}_{0i} \, \mathrm d\Sigma
–
\int_{\Omega’}
\sigma’_{ij}(\overrightarrow{\Phi})\epsilon’_{ij}(\bar{\vec{v}}_0)
\, \mathrm d\Omega’
\;.
\end{aligned}
\]
The integrals on \(S\) disappear since \(\vec{v}_{0|S}=0\)
and the integrals on \(\Sigma\) disappear by virtue of (19).
The variational formulation of the problem
for \(\vec{u}_0\) is to find \(\vec{u}_0 \in V_0\) such that
Conversely, let \(\vec{u}_0\) a function of \(t\) with values in \(V_0\) and verifying (20).
We have
\[
\int_{\Omega’}
\frac{\partial \sigma’_{ij}(\vec{u}_0)}{\partial x_{j}} \cdot \bar{v}_{0i}
\, \mathrm d\Omega’
=
\int_{\Omega’}
\left[
\frac{\partial}{\partial x_{j}}[ \sigma’_{ij}(\vec{u}_0) \bar{v}_{0i} ]
– \sigma’_{ij}(\vec{u}_0)\epsilon’_{ij}(\bar{\vec{v}}_0)
\right]
\, \mathrm d\Omega’
\]
and an anlogous equation by replacing \(\vec{u_0}\) by \(\overrightarrow{\Phi}\).
Using (20), we obtain
\[
– \int_{\Omega’}
\frac{\partial \sigma’_{ij}(\vec{u}_0)}{\partial x_{j}} \cdot \bar{v}_{0i}
\, \mathrm d\Omega’
+
\int_{\Sigma}
\sigma’_{ij}(\vec{u}_0) {n}_\text{ej} \bar{v}_{0i} \, \mathrm d\Sigma
=
\int_{\Omega’}
\frac{\partial \sigma’_{ij}(\overrightarrow{\Phi})}{\partial x_{j}} \cdot \bar{v}_{0i}
\, \mathrm d\Omega’
–
\int_{\Sigma}
\sigma’_{ij}(\overrightarrow{\Phi}) {n}_\text{ej} \bar{v}_{0i} \, \mathrm d\Sigma \;.
\]
Taking \(\vec{v}\in \left[ \mathscr{D} (\Omega’)\right]^3 \subset V_0\), we have
\[
– \frac{\partial \sigma’_{ij}(\vec{u}_0)}{\partial x_{j}}
=
\frac{\partial \sigma’_{ij}(\overrightarrow{\Phi})}{\partial x_{j}} \quad \text{in}\quad \mathscr{D}
(\Omega’) \;.
\]
Taking into account of \(v_{0n|\Sigma}=0\), we have
\[
\int_{\Sigma}
\overrightarrow{T}_{t}(\vec{u}_0)\cdot \vec{v}_{0t|\Sigma}
\, \mathrm d\Sigma
=
– \int_{\Sigma}
\overrightarrow{T}_{t}(\overrightarrow{\Phi})\cdot \vec{v}_{0t|\Sigma}
\, \mathrm d\Sigma \;,
\]
and, since \(\vec{v}_{0t|\Sigma}\) is arbitrary
\[
\overrightarrow{T}_{t}(\vec{u}_{0})_{|\Sigma}
=
– \overrightarrow{T}_{t}(\overrightarrow{\Phi})_{|\Sigma}
\]
and we find the auxiliary problem.
Let us return to its variational formulation (20).
The left-hand side can be considered as a scalar product in \(V_0\):
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{u}_0)\epsilon’_{ij}(\bar{\vec{v}}_0)
\, \mathrm d\Omega’
=\left(\vec{u}_0, \vec{v}_0 \right)_ {V_0}
\;,
\]
The associated norm \(\left\| \vec{u}_{0} \right\|_{V_0}\) being classically equivalent in \(V_0\) to the norm \(\left\| \vec{u}_{0} \right\|_{1}\) of
\( {\Xi}^1(\Omega’)\).
Since \( \vec{u}_0 \in V_0 \subset \widehat{\Xi}^1(\Omega’)\), we have
\[
\left(\vec{u}_0, \vec{v}_0 \right)_ {V_0}
=
\int_{\Omega’}
\sigma’_{ij}(\vec{u}_0)\epsilon’_{ij}(\bar{\vec{v}}_0)
\, \mathrm d\Omega’
=
\left(\vec{u}_0, \vec{v}_0 \right)_ {\widehat{\Xi}^1(\Omega’)}
\;.
\]
Setting \(\vec{v}_0=\vec{u}_0\), we have
\[
\left\| \vec{u}_0\right\|_{V_0}
=
\left\| \vec{u}_0\right\|_{\widehat{\Xi}^1(\Omega’)}
\quad
\forall \vec{u}_0 \in V_0
\;.
\]
The variational Equation (20) can be written as
But, we have
\[
\left|
\left(\overrightarrow{\Phi}, \vec{v}_0 \right)_ {\widehat{\Xi}^1(\Omega’)}
\right|
\leq
\left\| \overrightarrow{\Phi} \right\|_{\widehat{\Xi}^1(\Omega’)}
\left\| \vec{v}_0\right\|_{V_0}
\;,
\]
so that \(-\left(\overrightarrow{\Phi}, \vec{v}_0 \right)_ {\widehat{\Xi}^1(\Omega’)}\) is a continuous antilinear form on \(V_0\).
Then, by the Lax- Milgram theorem, the precedent problem has one and only solution.
Therefore, the problem (20) has one and one solution \(\vec{u}_0 \in V_0\) and the auxiliary problem has one and only one solution \(\vec{u}’\) in \({\widehat{\Xi}^1(\Omega’)}\).
The Equation (21) can be written
\[
\left(\vec{u}’, \vec{v}_0 \right)_ {\widehat{\Xi}^1(\Omega’)}=0
\quad \forall \vec{v}_0 \in V_0
\]
and the solution \(\vec{u}’\) of the auxiliary problem belongs to the orthogonal of \(V_0\) in \(\widehat{\Xi}^1(\Omega’)\).
Case 3. The solution \(\vec{u}’\) of the auxiliary problem does not depend on \(\overrightarrow{\Phi}\), since \(\overrightarrow{\Phi}\) is not in the terms of the problem. We are going to use this remark for giving a estimate of
\(\left\| \vec{u}’\right\|_{\widehat{\Xi}^1(\Omega’)}\).
We take, for \(\overrightarrow{\Phi}\), a continuous lifting of \(u_{n|\Sigma} \vec{n}\) in
\(\widehat{\Xi}^1(\Omega’)\); we have
\[
\left\| \overrightarrow{\Phi} \right\|_{\widehat{\Xi}^1(\Omega’)}
\leq
c
\left\| u_{n|\Sigma} \right\|_{H^{1/2}(\Sigma)}
\quad (c>0)
\;.
\]
We have
\[
\left|
\left(\vec{u}_0, \vec{v}_0 \right)_ {V_0}
\right|
\leq
\left\| \overrightarrow{\Phi} \right\|_{\widehat{\Xi}^1(\Omega’)}
\left\| \vec{v}_0\right\|_{V_0}
\]
and then
\[
\left\| \vec{u}_0\right\|_{V_0}
\leq
\left\| \overrightarrow{\Phi} \right\|_{\widehat{\Xi}^1(\Omega’)}
\]
and finally
\[
\left\| \vec{u}_0\right\|_{V_0}
\leq
c
\left\| u_{n|\Sigma} \right\|_{H^{1/2}(\Sigma)}
\]
For the solution \(\vec{u}’\) of the auxiliary problem, we have
\[
\vec{u}’=\vec{u}_0+\overrightarrow{\Phi}
\]
and then
Case 4. Finally, we study \(T_n(\vec{u}’)
_{|\Sigma}\) that is in the second dynamic condition (17) of the problem. We are going to show that it can be expressed by means of \(u_{n|\Sigma}\).
The solution \(\vec{u}’\) of our problem verifies:
\[
\frac{\partial \sigma’_{ij}(\vec{u}’)}{\partial x_{j}}=0
\quad \text{in} \quad \Omega’
\;.
\]
Let \( \vec{\tilde{w}}’\) an element of \(\widehat{\Xi}^1(\Omega’)\).
We have, by Green’s formula and
\( \vec{\tilde{w}}’_{|S}=0\) :
\[
0=- \int_{\Omega’}
\frac{\partial \sigma’_{ij}(\vec{u}’)}{\partial x_{j}} \cdot \bar{\tilde{w}}_{i}
\, \mathrm d\Omega’
=
-\int_{\Sigma}
\sigma’_{ij}(\vec{u}’) {n}_\text{ej} \bar{\tilde {w}}_{i} \, \mathrm d\Sigma
+ \int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{\tilde{w}}}’)
\, \mathrm d\Omega’
\;.
\]
Since the solution \(\vec{u}’\) of the initial problem
verifies \(\vec{T}_t(\vec{u}’)
_{|\Sigma}=0\), the precedent equation gives:
On the other hand, if \(\vec{v}’\in \left[ \mathscr{D} (\Omega’)\right]^3\), we have
\[
0=-
\left\langle
\frac{\partial \sigma’_{ij}(\vec{u}’)}{\partial x_{j}}
, v’_i
\right\rangle
=
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)
\frac{\partial \bar{v}’_{i}}{\partial x_{j}}
\, \mathrm d\Omega’
\]
by virtue of the definition of the distributional derivatives.
Therefore, we have
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{v}}’)
\, \mathrm d\Omega’
=0
\quad \forall \vec{v}’\in \left[ \mathscr{D} (\Omega’)\right]^3
\]
and by density
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{v}}’)
\, \mathrm d\Omega’
=0
\quad \forall \vec{v}’\in \Xi ^1(\Omega’)
\;.
\]
Now, we are going to particularize
\(\vec{\tilde{w}}’\).
Let call \(w’_{n|\Sigma}\) a function defined on \(\Sigma\) and belonging to \(H^{1/2}(\Sigma)\) and let take for \(\vec{\tilde{w}}’\) a lifting of \(w’_{n|\Sigma}\vec{n}\) in \( \widehat{\Xi} ^1(\Omega’)\) (so that we have
\(\tilde{w}’_{n|\Sigma}=w’_{n|\Sigma}\)). We set
Since the difference between lifting belongs to
\( \Xi ^1(\Omega’)\), the right-hand side doesn’t depend on the lifting \(\vec{\tilde{w}}’\). Therefore, \(\ell\) depends on \(w’_{n|\Sigma}\).
Let choose for \(\vec{\tilde{w}}’\) a continuous lifting of \(w’_{n|\Sigma}\vec{n}\); for this lifting, we have
\[
\left\| \vec{\tilde{w}}’\right\|_{\widehat{\Xi}^1(\Omega’)}
\leq
\alpha
\left\| w’_{n|\Sigma} \vec{n}\right\|_{\left(H^{1/2}(\Sigma)\right)^3}
\;, \quad (\alpha>0)
\]
and, if the components of \(\vec{n}\) are sufficiently smooth:
\[
\left\| \vec{\tilde{w}}’\right\|_{\widehat{\Xi}^1(\Omega’)}
\leq
\beta
\left\| w’_{n|\Sigma}\right\|_{H^{1/2}(\Sigma)}
\;, \quad (\beta>0)
\]
But, we have
\[
\left|
\ell(\vec{\tilde{w}}’)
\right|
\leq
\left\| \vec{u}’\right\|_{\widehat{\Xi}^1(\Omega’)}
\cdot
\left\| \vec{\tilde{w}}’\right\|_{\widehat{\Xi}^1(\Omega’)}
\]
and consequently
Then, since \(\ell\) depends on \(w’_{n|\Sigma}\), it is a continuous antilinear functional on
\(H^{1/2}(\Sigma)\), i.e an element of \(\left[H^{1/2}(\Sigma)\right]’\). Taking into account of
\(\tilde{w}’_{n|\Sigma}=w’_{n|\Sigma}\), the equation (23) can be written
\[
\int_{\Sigma}
{T}_{n}(\vec{u}’)_{|\Sigma} \cdot \bar{w}’_{n|\Sigma}
\, \mathrm d\Sigma
=-\ell(\vec{\tilde{w}}’)
\;,
\]
so that the normal stress \( {T}_{n}(\vec{u}’)_{|\Sigma} \) can be considered as an element of
\(\left( H^{1/2}(\Sigma) \right)’\).
Therefore, we have
\[
\begin{aligned}
&
\left|
\left\langle
{T}_{n}(\vec{u}’)_{|\Sigma},
w’_{n|\Sigma}
\right\rangle_{\left( H^{1/2}(\Sigma) \right)’,H^{1/2}(\Sigma) }
\right|
\leq
\beta
\left\| \vec{u}’\right\|_{\hat{\Xi}^1(\Omega’)}
\cdot
\left\| w’_{n|\Sigma}\right\|_{H^{1/2}(\Sigma)}
\\
&
\quad \forall w’_{n|\Sigma} \in H^{1/2}(\Sigma)\;,
\end{aligned}
\]
and then
\[
\left\|
T_n(\vec{u}’)
\right\|_{\left( H^{1/2}(\Sigma) \right)’}
\leq
\beta
\left\| \vec{u}’\right\|_{\widehat{\Xi}^1(\Omega’)}
\;.
\]
Using (22), we obtain finally
\[
\left\|
T_n(\vec{u}’)
\right\|_{\left( H^{1/2}(\Sigma) \right)’}
\leq
\delta
\left\| u_{n|\Sigma}\right\|_{H^{1/2}(\Sigma)}
\quad (\delta=2c\beta)
\;.
\]
Consequently, there exists a continuous linear operator \(\widehat{T}\) from \(H^{1/2}(\Sigma)\) into
\(\left( H^{1/2}(\Sigma) \right)’\) such that
So, we have expressed linearly \(T_n(\vec{u}’)_{|\Sigma}\) by means of \(u_{n|\Sigma}\).
The linear operator \(\widehat{T}\) depends on the elasticity of the body.
We are going to prove that it has properties of symmetry and positivity.
We introduce the analogous problem: to find \({\vec{\tilde{u}}}’ \in \widehat{\Xi}^1(\Omega’)\)
verifying
In (23), we replace \(\vec{\tilde{w}}’\) by
\(\vec{\tilde{u}}’\) and we have
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{\tilde{u}}}’)
\, \mathrm d\Omega’
=
– \int_{\Sigma}
{T}_{n}(\vec{u}’)_{|\Sigma} \; \bar{\tilde{u}}’_{n|\Sigma}
\, \mathrm d\Sigma
=
\left\langle
\widehat{T}u_{n|\Sigma},
\tilde{u}’_{n|\Sigma}
\right\rangle
\]
and since \( \tilde{u}’_{n|\Sigma}= \tilde{u}_{n|\Sigma}\):
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{\tilde{u}}}’)
\, \mathrm d\Omega’
=
\left\langle
\widehat{T}u_{n|\Sigma},
\tilde{u}_{n|\Sigma}
\right\rangle
\,.
\]
Inverting roles of \(\vec{u}’\) and \(\vec{\tilde{u}}’\), we obtain
\[
\int_{\Omega’}
\sigma’_{ij}(\vec{\tilde{u}}’)\epsilon’_{ij}(\bar{\vec{u}}’)
\, \mathrm d\Omega’
=
\left\langle
\widehat{T}\tilde{u}_{n|\Sigma},
{u}_{n|\Sigma}
\right\rangle
\,.
\]
By virtue of the classical symmetry of the left-hand side, we obtain the property of hermitian symmetry
\[
\left\langle
\widehat{T}u_{n|\Sigma},
\tilde{u}_{n|\Sigma}
\right\rangle
=
\overline{
\left\langle
\widehat{T}\tilde{u}_{n|\Sigma},
{u}_{n|\Sigma}
\right\rangle
}
~.
\]
Now, setting \(\vec{\tilde{u}}’=\vec{u}’\), we have
\[
\left\langle
\widehat{T}u_{n|\Sigma},
{u}_{n|\Sigma}
\right\rangle
=
\int_{\Omega’}
\sigma’_{ij}(\vec{u}’)\epsilon’_{ij}(\bar{\vec{u}}’)
\, \mathrm d\Omega’
=
\left\|
\vec{u}’
\right\|^{2}_{\widehat{\Xi}^1(\Omega’)}
~.
\]
By virtue of a trace theorem, we have
\[
\left\| u_{n|\Sigma}\right\|_{H^{1/2}(\Sigma)}
\leq
C
\left\|
\vec{u}’
\right\|_{\widehat{\Xi}^1(\Omega’)}
\quad (C>0)
~.
\]
so that we have
\[
\left\langle
\widehat{T}u_{n|\Sigma},
{u}_{n|\Sigma}
\right\rangle
\geq
C^{-2}\left\| u’_{n|\Sigma}\right\|^{2}_{H^{1/2}(\Sigma)}
\]
and, since \(u’_{n|\Sigma}=u_{n|\Sigma}\), the relation of positivity
\[
\left\langle
\widehat{T}u_{n|\Sigma},
{u}_{n|\Sigma}
\right\rangle
\geq
C^{-2}\left\| u_{n|\Sigma}\right\|^{2}_{H^{1/2}(\Sigma)}
\,.
\]
The second dynamic condition (17) can be written as:
\begin{equation}
\label{eq28}
p_{|\Sigma}=\widehat{T}u_{n|\Sigma}+\rho_{0|_\Sigma} g \, n_{3|\Sigma}\;u_{n|\Sigma}\;.
\end{equation}
(28)
So, we have reduced ou problem to a problem for a gas only:
Conversely, let \(\vec{u}\) a function of \(t\) with values in the field of the admissible displacements and verifying (31).
We obtain easily from (31)
\begin{equation*}
\left.
\begin{aligned}
& 0=
\int_\Omega
\rho_{0}
\left[
\ddot{\vec{u}} -\overrightarrow{\text{grad}}
\left(
\frac{c^{2}_{0}}{\rho_{0}}
\text{div}\left(\rho_0\vec{u}\right)
\right)
\right]\cdot
\overrightarrow{\text{grad}}\, \bar{\tilde{\varphi}}
\, \mathrm d\Omega
\\
&
\quad \quad
+
\int_{\Sigma}
\left[
c^{2}_{0} \text{div}\left(\rho_0\vec{u}\right)
+
\widehat{T}u_{n|\Sigma}+\rho_{0|_\Sigma} g \, n_{3|\Sigma}\;u_{n|\Sigma}
\right]
\frac{\partial \bar{\tilde{\varphi}}}{\partial n}_{|\Sigma}
\, \mathrm d\Sigma
\end{aligned}
\right\}
\,\, \forall \vec{\tilde{u}}=\overrightarrow{\text{grad}}\, \tilde{\varphi}
\,.
\end{equation*}
or
This Weumann problem has for solution only \(\Psi=constant\) and consequently
\[
\ddot{\vec{u}} -\overrightarrow{\text{grad}}
\left(
\frac{c^{2}_{0}}{\rho_{0}}
\text{div}\left(\rho_0\vec{u}\right)
\right) =0
\,.
\]
6. The problem is a classical vibration problem
Case 1. We precise the field of the admissible displacements by introducing the space \(V\):
\[
V=
\left\{
\begin{aligned}
&
\vec{\tilde{u}} \in \mathscr{L}^2(\Omega)
\overset{\text{def}}{=}\left[ L^2(\Omega) \right]^3 \;\; ;\;\;
\vec{\tilde{u}}=\overrightarrow{\text{grad}}\, \tilde{\varphi}
\;\;;\;\;
\tilde{\varphi} \in \widetilde{H}^1(\Omega)
\;\;;\;\;
\text{div}\left(\rho_0\vec{\tilde{u}}\right) \in L^2(\Omega)
;
\\
&
\frac{\partial {\tilde{\varphi}}}{\partial n}_{|\Sigma}= \tilde{u}_{n|\Sigma}
\in H^{1/2}(\Sigma)
\,.
\end{aligned}
\right\}
\,,
\]
equipped with the hilbertian norm defined by
\[
\left\|\vec{u}\right\|_{V} ^2= \int_{\Omega} \rho_0 \, \left|\vec{u}\right|^2 \, \mathrm
d\Omega
+
\int_{\Omega} \left|
\text{div}\left(\rho_0 \vec{u}\right)
\right|^2 \, \mathrm d\Omega
+\left\|{u}_{n|\Sigma} \right\|_{H^{1/2}(\Sigma)}^2
\,,
\]
and the space \(H\) completion of \(V\) for the norm associated to the scalar product
\[
\left(
\vec{u},\vec{\tilde{u}}
\right)_H
=
\int_\Omega \rho_{0} {\vec{u}} \cdot \bar{\vec{\tilde{u}}}
\, \mathrm d\Omega
\,.
\]
Setting
\[
a\left(
\vec{u},\vec{\tilde{u}}
\right)
=
\int_\Omega
\frac{c^{2}_{0}}{\rho_{0}}
\text{div}\left(\rho_0 \vec{u}\right)
\text{div}\left(\rho_0 \bar{\vec{\tilde{u}}} \right)
\, \mathrm d\Omega
+
\int_{\Sigma}
\left(
\widehat{T}u_{n|\Sigma}+\rho_{0|_\Sigma} g \, n_{3|\Sigma}\;u_{n|\Sigma}
\right)
\bar{\tilde{u}}_{n|\Sigma}
\, \mathrm d\Sigma
\,,
\]
we obtain the precise variational formulation of the problem. To find \(\vec{u} (\cdot) \in V \) such that
\[
\left(
\ddot{\vec{u}},\vec{\tilde{u}}
\right)_H
+
a\left(
\vec{u},\vec{\tilde{u}}
\right)
=0
\quad \forall \vec{\tilde{u}} \in V \,.
\]
Case 2. Let us study the hermitian sesquilinear form
\[
\mathscr{C}
\left(
u_{n|\Sigma}
,
{\tilde{u}}_{n|\Sigma}
\right)
\overset{\text{def}}{=}
\int_{\Sigma}
\left(
\widehat{T}u_{n|\Sigma}+\rho_{0|_\Sigma} g \, n_{3|\Sigma}\;u_{n|\Sigma}
\right)
\bar{\tilde{u}}_{n|\Sigma}
\, \mathrm d\Sigma
\]
\(\mathscr{C}\) is continuous on \(H^{1/2}(\Sigma)\times H^{1/2}(\Sigma)\) and we have:
\[
\mathscr{C}
\left(
u_{n|\Sigma}
,
{u}_{n|\Sigma}
\right)
\geq
\left(
C^{-2}-\text{max}\rho_{0|\Sigma}\,g
\right)
\left\|{u}_{n|\Sigma} \right\|_{H^{1/2}(\Sigma)}^2
\,.
\]
In the following, we suppose that \(\mathscr{C}\) is coercive, i.e
\[
C^{-2}-\text{max}\rho_{0|\Sigma}\,g>0
\]
(for example, if \(\text{max}\rho_{0|\Sigma}\) is sufficiently
small).
Then, \(\left[ \mathscr{C}
\left(
u_{n|\Sigma}
,
{u}_{n|\Sigma}
\right)
\right]^{1/2}\)
defines on \(H^{1/2}(\Sigma)\) a norm that is equivalent to the classical norm of \(H^{1/2}(\Sigma)\).
Case 3.
In order to prove that the problem is a classical vibration problem, we use the method that is introduced in [7].
We must prove that
a)
\(
\left[ a\left(
\vec{u},\vec{u}
\right)
\right]^{1/2}\)
defines on \(V\) a norm equivalent to
\(\left\|
\vec{u}
\right\|_{V}\).
b)
The imbedding \(V\subset H\), obviously dense and continuous, hence compact.
We omit the proof that is strictly identical to the proof in [7], p66-68.
Therefore there exists a denumerable infinity of positive real eigenvalues \(\omega^2_p\):
\[
0< \omega^2_1 \leq \omega^2_2 \leq \cdots \leq \omega^2_p\leq \cdots \,;\,\, \omega^2_p
\rightarrow + \infty \,\, \text{when}\,\, p \rightarrow +\infty
\,.
\]
The eigenelements
\(\left\{ \vec{u}_p\right\}\) form an orthonormal basis in \(H\) and an orthogonal basis in \(V\) equipped with the scalar product
\(\left(
\vec{u},\vec{\tilde{u}}
\right)_V\).
To each eigenmotion \(\left\{ \vec{u}_p\right\}\) of the gas corresponds an eigenmotion \(\left\{ \vec{u}'_p\right\}\) of the elastic body verifying
\[
\left\| \vec{u}'_p\right\|_{\widehat{\Xi}^1(\Omega')}
\leq
2c
\left\| u_{np|\Sigma} \right\|_{H^{1/2}(\Sigma)}.
\]
Author Contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Competing Interests
The author(s) do not have any competing interests in the manuscript.
References
Moiseyev, N. N. (1952). About the oscillations of an ideal incompressible liquid in a container. In Doklady AN SSSR (Vol. 85, pp. 1-20). [Google Scholor]
Kopachevsky, N. D., & Krein, S. (2012). Operator Approach to Linear Problems of Hydrodynamics: Volume 2: Nonself-adjoint Problems for Viscous Fluids (Vol. 146). Birkhäuser.[Google Scholor]
Moiseyev, N. N., & Rumyantsev, V. V. (2012). Dynamic stability of bodies containing fluid (Vol. 6). Springer Science & Business Media.[Google Scholor]
Morand, H.J-P., & Ohayon, R. (1992). Interactions fluides-structures-Masson. Paris.[Google Scholor]
Rapoport, I.M. (1968). Rapoport, I. M. (2012). Dynamics of elastic containers: partially filled with liquid (Vol. 5). Springer Science & Business Media.[Google Scholor]
Essaouini, H., El Bakkali, L., & Capodanno, P. (2017). Mathematical study of the three dimensional oscillations of a heavy almost homogeneous liquid partially filling an elastic container. Electronic Journal of Mathematical Analysis and Applications, 5 (1), 64-80. [Google Scholor]
Hubert, J. S. (2012). Vibration and coupling of continuous systems: asymptotic methods. Springer Science & Business Media.[Google Scholor]